Ручное управление действиями робота выполняется с помощью панели управления.
Установка скорости вращения сервоприводов
Скорость работы сервоприводов измеряется в процентах от максимальной и устанавливается перемещением ползунка влево и вправо. Перемещение ползунка влево уменьшает скорость вращения сервоприводов, вправо – увеличивает. 
!!! ВНИМАНИЕ
Значение скорости вращения устанавливается для всех сервоприводов.
Управление действиями робота с помощью манипулятора “мышь”
Управление действиями робота осуществляется с помощью группы кнопок, выделенных для каждого сервопривода. Кнопки расположены в одну линию на экране.
На каждой кнопке изображена стрелка с направлением движения. При нажатии на кнопку правой клавишей манипулятора “мышь”, робот выполняет соответствующее данной кнопке действие.
По центру группы кнопок расположена пиктограмма работа, на которой красным цветом выделен сервопривод, которым управляет данная группа кнопок.
При работе сервопривода, изображение мерцает.
Рядом с каждой кнопкой имеется индикатор, показывающий угол отклонения сервопривода при ее нажатии.
-
вращение башни манипулятора вправо и влево вокруг вертикальной оси

-
движение рычага манипулятора вперед или назад

-
движение рычага манипулятора вверх или вниз

-
сжатие или разжатие рук клешни

-
поворот захвата

Управление действиями робота с помощью мобильных устройств
Для управления роботом с помощью экранов мобильных устройств (смартфоны, планшеты, где управление осуществляется без манипулятора “мышь”) рекомендуется использовать интерфейс “Геймпад”.
Кнопки распределены на правой и левой стороне экрана устройства для удобного управления пальцами. При нажатии на кнопку, робот выполняет соответствующее данной кнопке действие.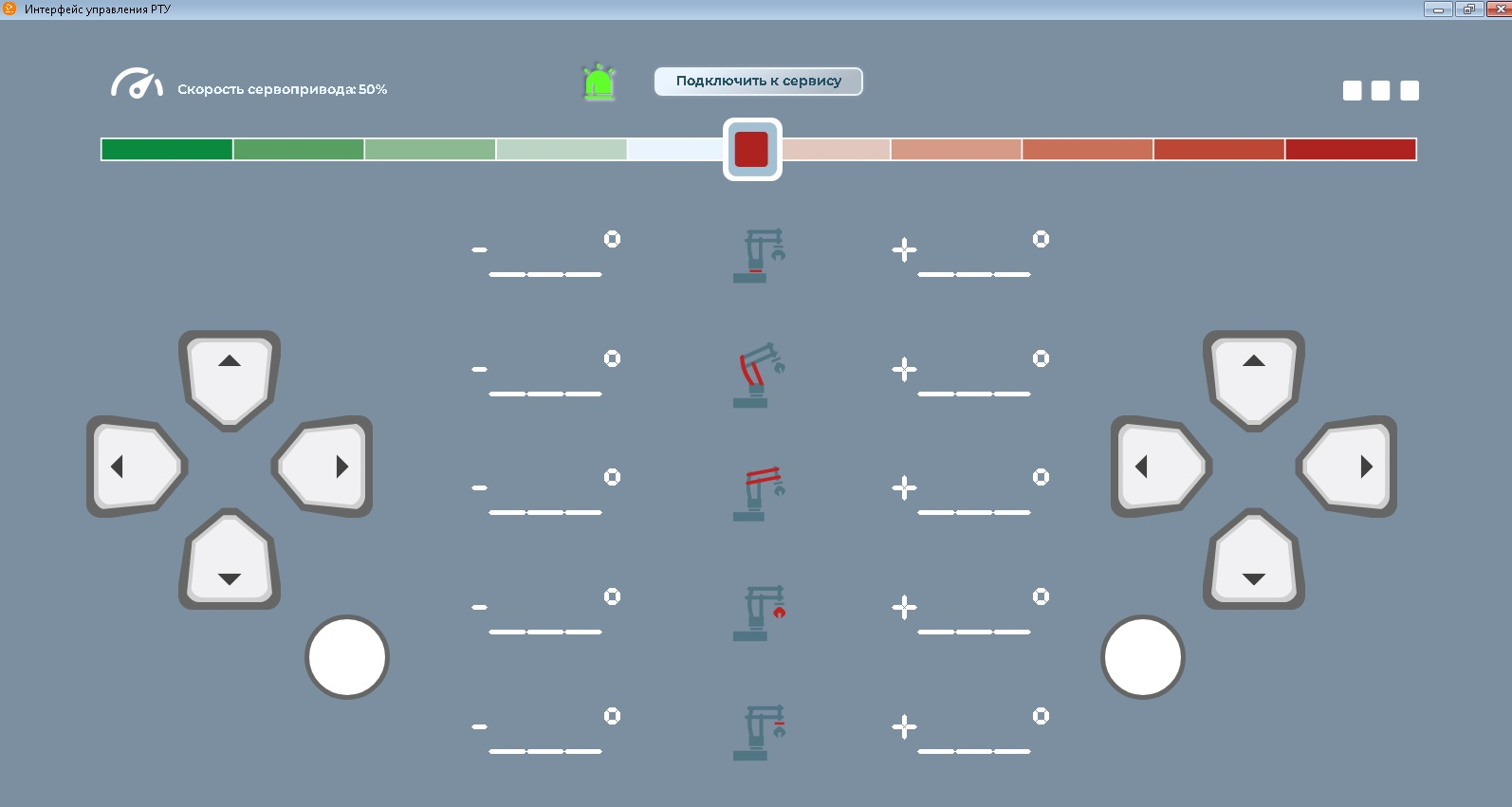
Левая группа кнопок:
- Кнопки «Влево», «Вправо» - вращение башни манипулятора вправо и влево вокруг вертикальной оси
- Кнопки «Вверх», «Вниз» - движение рычага манипулятора вперед или назад
Правая группа кнопок:
- Кнопки «Влево», «Вправо» - сжатие или разжатие клешни
- Кнопки «Вверх», «Вниз» - движение рычага манипулятора вверх или вниз
Управление действиями робота с помощью джойстика “Геймпад”
Роботом можно управлять с помощью устройства “Геймпад”. Для этого необходимо подключить устройство “Геймпад” к компьютеру, к которому подключен робот. Управление роботов выполняется с помощью кнопок устройства “Геймпад” аналогично схеме “Геймпад” пульта управления.
Управление действиями робота с помощью смартфона
Роботом можно управлять также со смартфона, открыв пульт управления через браузер. Для открытия пульта управления РТУ в адресной строке браузера необходимо указать IP адрес ПК, на котором установлена десктопная версия пульта РТУ и через двоеточие - порт, который был указан при установке пульта РТУ на ПК. При установке смартфона в горизонтальное положение автоматически будет применен интерфейс “Геймпад”. Управление роботом производится аналогично управлению на ПК.
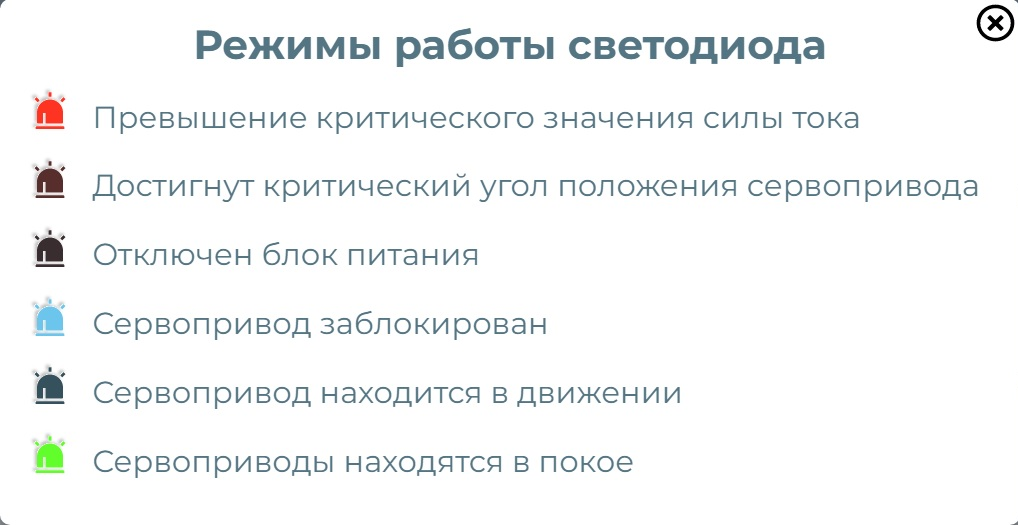
Отображение состояния робота с помощью светодиода
При любом виде управления роботом, его состояние (движение, простой, достижение критических значений угла поворота) отображается с помощью светодиода установленного на роботе. Состояние светодиода отображается также на графическом изображении светодиода, расположенном посередине в верхней части экрана. В зависимости от состояния робота изменяется цвет и режим работы светодиода. Подсказка с описанием состояний светодиода открывается при нажатии на изображение светодиода левой кнопкой мыши.