Для начала работы с роботом необходимо:
1. Подключите робот к компьютеру или ноутбуку через порт USB с помощью кабеля USB — microUSB, входящего в состав набора.
2. Подключите робот-манипулятор к электрической сети. Ваш робот-манипулятор может комплектоваться блоком питания или USB адаптером питания со шнуром USB.
2.1. Если Ваш робот-манипулятор укомплектован блоком питания, подключите штекер шнура блока питания к разъёму питания робота-манипулятора DC 5,5 x 2,5 как показано на рисунке ниже.
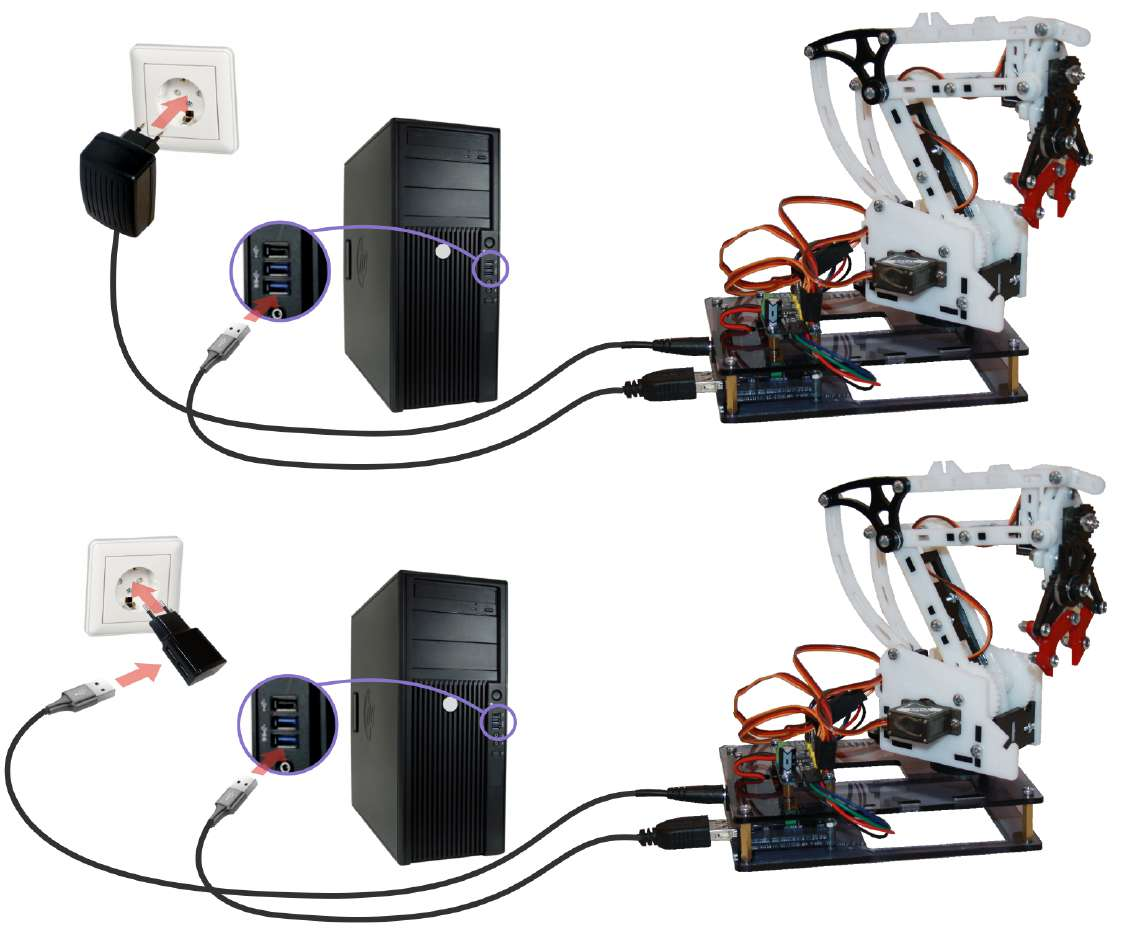 2.2. Если Ваш робот-манипулятор укомплектован USB адаптером питания, подключите USB разъём шнура питания к USB адаптеру, штекер питания USB шнура питания к разъёму питания робота-манипулятора DC 5,5 x 2,5 как показано на рисунке выше.
2.2. Если Ваш робот-манипулятор укомплектован USB адаптером питания, подключите USB разъём шнура питания к USB адаптеру, штекер питания USB шнура питания к разъёму питания робота-манипулятора DC 5,5 x 2,5 как показано на рисунке выше.
Внимание! Подключайте блок питания или адаптер питания робота-манипулятора только к сети переменного тока напряжением 220+-22В с частотой 50 Гц. Будьте осторожны с электричеством.
3. Установите программное обеспечение “Пульт управления РТУ” согласно руководства, приведённого в разделе “Установка программного обеспечения”
4. Проверьте стартовое положение робота. При необходимости откалибруйте стартовое положение согласно руководства, приведённого в разделе “Калибровка сервоприводов робота”