!!! ВНИМАНИЕ
Перед началом работы обязательно разверните вручную манипулятор из транспортировочного в рабочее положение, как показано на рисунке ниже (разворот из транспортировочного положения производить аккуратно, без усилия), после чего закрепите робот-манипулятор на рабочем столе с координатной сеткой с помощью входящих в комплект четырех шурупов и шестигранного ключа или крестовой отвертки (в зависимости от поставляемых шурупов). Для этого в углах основания робота манипулятора имеются сквозные отверстия. Совместите данные отверстия с отверстиями просверленными на рабочем столе с координатной сеткой и закрутите шурупы М3х25 в рабочий стол.
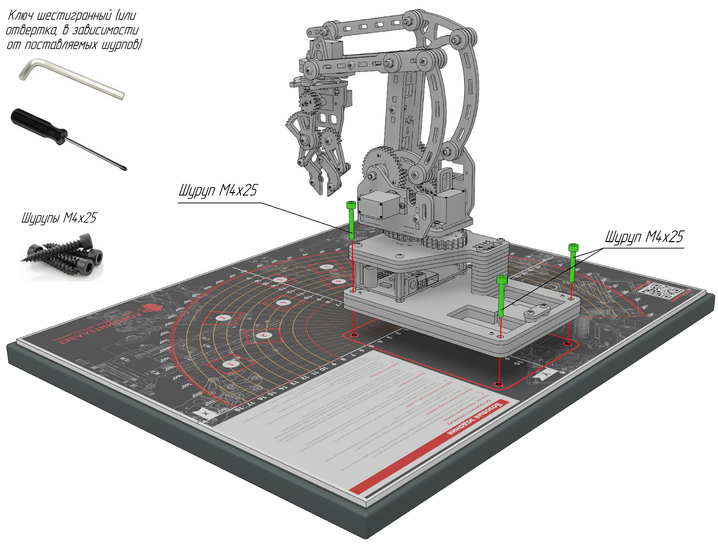
Шурупы должны быть закручены плотно, чтобы робот-манипулятор не мог самопроизвольно менять своё положение на координатной сетке, но не слишком сильно, чтобы не сломать акриловое основание робота-манипулятора.
Для начала работы с роботом необходимо:
-
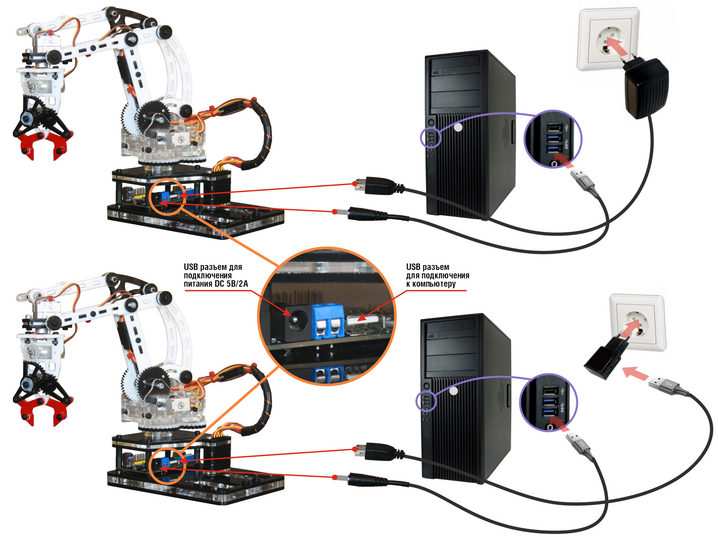
Подключите робот к компьютеру или ноутбуку через порт USB с помощью кабеля USB - USB, входящего в состав набора.
-
Подключите робот-манипулятор к электрической сети. Ваш робот-манипулятор может комплектоваться блоком питания или USB адаптером питания со шнуром USB.
-
Если Ваш робот-манипулятор укомплектован блоком питания, подключите штекер шнура блока питания к разъёму питания робота-манипулятора DC 5,5 x 2,5 как показано на рисунке ниже.
-
Если Ваш робот-манипулятор укомплектован USB адаптером питания, подключите USB разъём шнура питания к USB адаптеру, штекер питания USB шнура питания к разъёму питания робота-манипулятора DC 5,5 x 2,5 как показано на рисунке ниже.
-
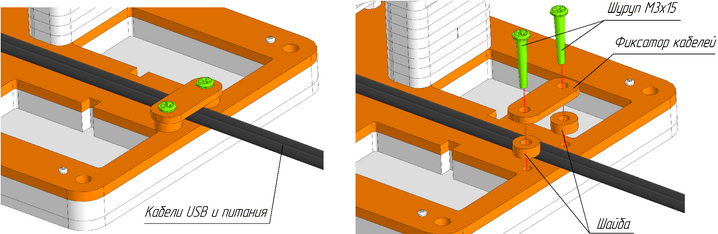
Закрепите кабели при помощи фиксатора на основании робота, как показано на фото ниже. Для этого, при помощи крестовой отвертки открутите два шурупа М3х14, уложите кабели, проверьте что они плотно вставлены в свои разъемы и соберите фиксатор.
-
!!! ВНИМАНИЕ
Подключайте блок питания или адаптер питания робота-манипулятора только к сети переменного тока напряжением 220±22В с частотой 50 Гц. Будьте осторожны с электричеством.
4. Установите программное обеспечение “Пульт управления РТУ”. Подробно как установить “Пульт управления” изложено в разделе “Управление роботами с помощью ПО “Пульт управления роботами манипуляторами”
5. Проверьте стартовое положение робота. При необходимости откалибруйте стартовое положение. Как это сделать изложено в разделе “Калибровка и позиционирование сервоприводов”