Устройство робота-манипулятора
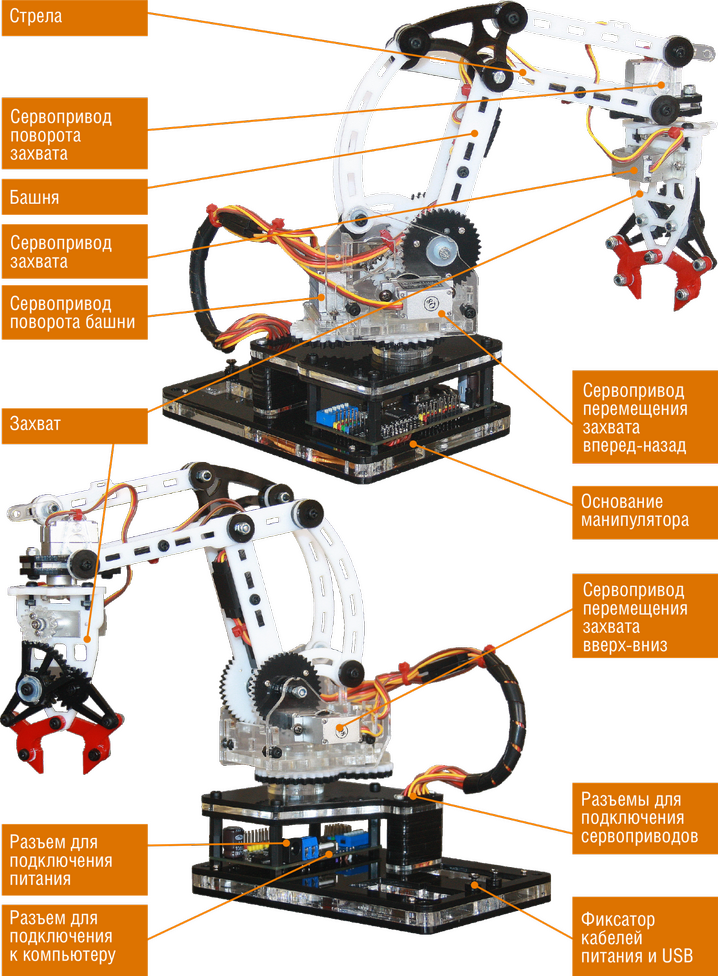
Основные узлы робота-манипулятора
Описание механических узлов и электронных компонентов
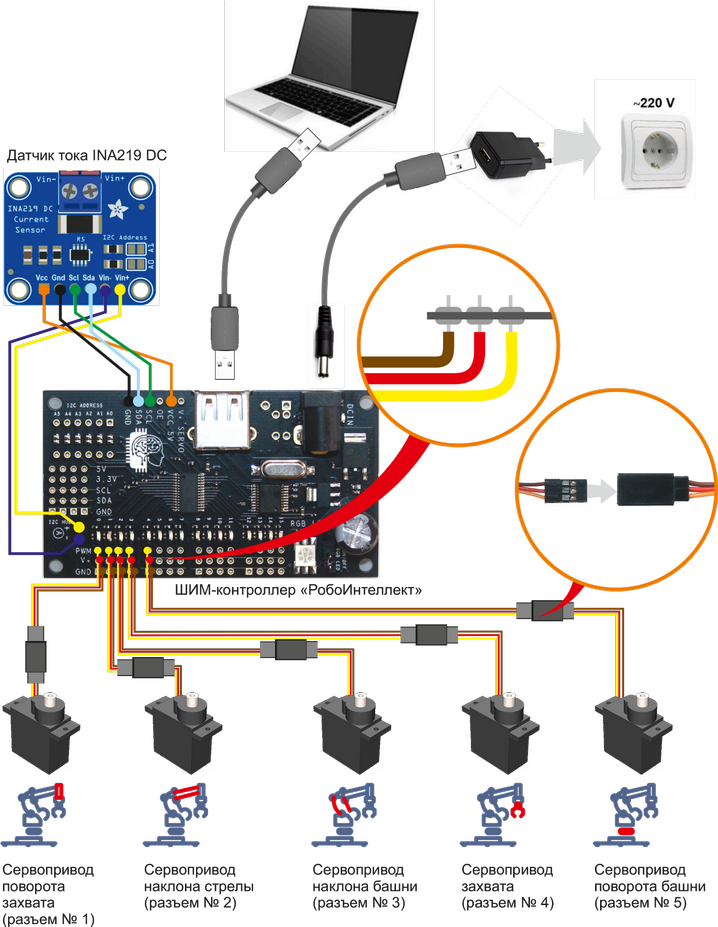
- Разъем для подключения питания питания (DC 5,5 x 2,5). Используется для подключения электропитания к роботу-манипулятору.
- USB разъем для подключения к компьютеру. Используется для подключения робота к компьютеру или ноутбуку по USB.
- Захват. Предназначен для захвата или освобождения груза с помощью зажимов клешни.
- Сервопривод захвата. Используется для приведения в движение зажимов клешни для захвата или освобождения груза.
- Сервопривод поворота захвата. Используется для поворота захвата вокруг вертикальной оси. Позволяет устанавливать захват под углом вокруг вертикальной оси захвата.
- Основание башни. Выполняет функцию рамы, на которой крепится длинная консольная ось башни и опорно-поворотное устройство. На основании башни также закреплены сервопривод поворота башни, а также сервоприводы движения захвата вперед-назад и вверх-вниз.
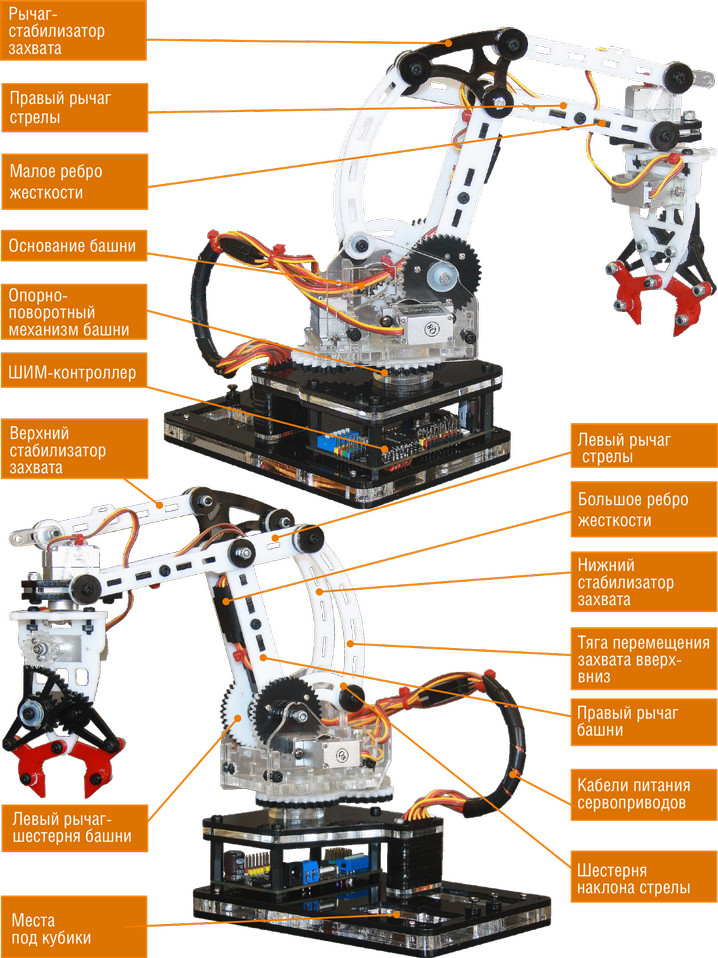
- Опорно-поворотный механизм башни. Используется для закрепления манипулятора на основании, а также для его вращения.
- Башня. Состоит из правого рычага башни и левого рычага-шестерни башни, соединенных между собой большим ребром жесткости. Башня наклоняясь перемещает захват вперед-назад. Наклон башни через редуктор задает сервопривод перемещения захвата вперед-назад.
- Правый рычаг башни. Элемент конструкции башни.
- Левый рычаг-шестерня башни. Используется для передачи движения от сервопривода через шестерню редуктора.
- Большое ребро жесткости. Соединяет между собой рычаги башни повышая ее жесткость и прочность.1
- Сервопривод перемещения захвата вперед-назад. Перемещает захват вперед-назад, наклоняя вперед-назад башню. Наклон башни осуществляется через редуктор на левом рычаге-шестерне башни.
- Стрела. Состоит из правого и левого рычагов стрелы, соединенных между собой малым ребром жесткости. Стрела наклоняясь перемещает захват вверх-вниз. Наклон стрелы происходит через тягу и шестерню-рычаг.
- Правый рычаг стрелы. Элемент конструкции стрелы.
- Левый рычаг стрелы. Используется для наклона стрелы при помощи тяги перемещения захвата вверх-вниз.
- Тяга перемещения захвата вверх-вниз. Перемещает вверх-вниз левый рычаг стрелы и захват закрепленный на стреле.
- Малое ребро жесткости. Соединяет между собой рычаги стрелы повышая ее жесткость и прочность.
- Сервопривод перемещения захвата вверх-вниз. Перемещает захват вверх-вниз, наклоняя вверх-вниз стрелу. Наклон стрелы осуществляется через тягу, шестерню-рычаг и редуктор на шестерне-рычаге.
- Шестерня-рычаг наклона стрелы. Используется для перемещения захвата вверх-вниз.
- Нижний стабилизатор захвата и верхний стабилизатор захвата. Элементы плоско-параллельной кинематики манипулятора. Используются для стабилизации вертикального положения захвата при его перемещениях вперед-назад и вверх-вниз.
- Рычаг-стабилизатор захвата. Используется для соединения в одну систему стабилизации нижнего и верхнего стабилизаторов захвата.
- ШИМ-контроллер “РобоИнтеллект”. Используется для управления исполнительными устройствами робота-манипулятора (например: светодиод, сервоприводы). Входной интерфейс управления I2C. Управление устройствами на выходе драйвера осуществляется по 16 каналам широтно-импульсной модуляцией.
- Датчик тока INA219 DC. Датчик тока измеряет какой ток потребляют сервоприводы во время работы, эту информацию он передает по шине данных SPI на ШИМ-контроллер и на компьютер. В программе “Пульт управления РТУ” потребление тока отображается в виде графика в реальном времени.
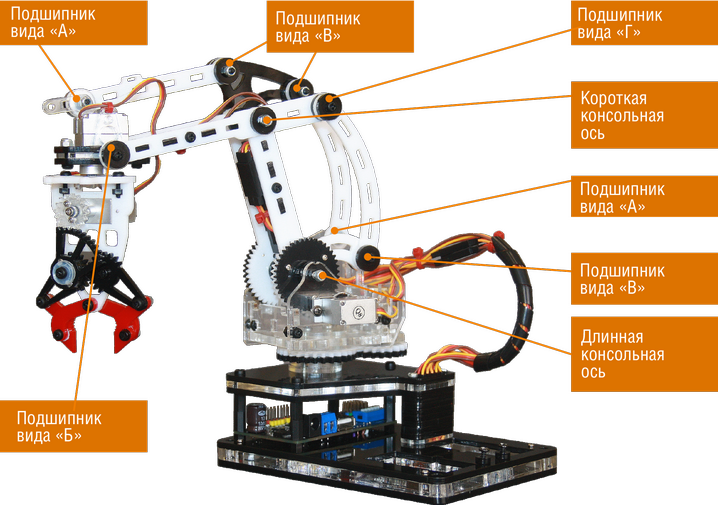
- Подшипниковые узлы. Снижают трение в местах соединения рычагов и осей манипулятора.
Схема соединения электронных компонентов