RI_SDK_exec_RServoDrive_RotateByPulse #
Описание метода #
Вращение сервопривода определенное значением импульса до тех пор, пока не поступит команда остановки сервопривода или новая команда на вращение.
Выполняет вращение сервопривода с направлением и скоростью заданным с помощью импульса в микросекундах (0-3000 мкс).
Размер рабочего диапазона для mg996r - по часовой стрелке 1020 мкс (от 400 до 1420 мкс), против часовой стрелки 1020 мкс (от 1540 до 2560 мкс). Максимальная скорость при вращении по часовой стрелке достигается при минимальном значении из рабочего диапазона, для вращения против часовой наоборот, минимальное значение из рабочего диапазона вращает сервопривод с минимальной скоростью. Для управляющего сигнала между диапазонами вращение не происходит.
Даже в рамках одной и той же модели сервопривода существует погрешность, допускаемая при производстве, которая приводит к тому, что рабочий диапазон длин импульсов отличается. Для точной работы каждый конкретный сервопривод должен быть откалиброван: путём экспериментов необходимо подобрать корректный диапазон, характерный именно для него. С помощью метода инициализации кастомного сервопривода вращения можно инициализировать сервопривод с откалиброванными характеристиками.
Блок может работать в синхронном или асинхронном режиме.
При синхронном режиме программа, которая вызвала данную функцию, сначала ожидает её выполнение, а потом продолжает вызовы других команд. При асинхронном режиме функция вызывается, но ожидания её завершения не происходит. Другие команды могут перекрыть её выполнение и функция не отработает.
Для своей работы блок поворота сервопривода использует метод библиотеки RISDK.
Примеры #
В данном примере осуществляется вращение сервопривода против часовой стрелки с максимальной скоростью, соответствующее максимальному значению управляющего импульса для поворота против часовой стрелки (2520 микросекунд).
В результате работы программы может быть выведена такая строчка: « Сервопривод вращения №0 | Синхронно вращение по импульсу 2520 мкс. »
Методы вращения без заданного таймера предпочтительно использовать в асинхронной группе. В приведенном примере группа действий является асинхронной и вращение будет остановлено через 2 секунды ожидания. Если группа действий "Вращение" будет находилась в синхронном режиме, то блок "вращение по импульсу" будет выполняться бесконечно(пока запущенна программа) и очередь до команды остановки никогда не дойдет.
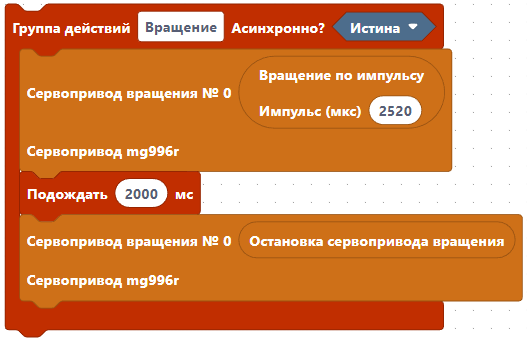
В результате работы программы будут выведены такие строчки:
«Асинхронная группа действий "Вращение" началась. »
«Сервопривод вращения №0 | Асинхронно вращение по часовой с относительной скоростью 50% »
«Ожидание 2000 миллисекунд »
«Сервопривод вращения №0 | Остановлен. »
«Асинхронная группа действий "Вращение" закончилась. »