На текущий момент мы предоставляем две модели роботов-манипуляторов: RM 001 и RM 002.
Робот-манипулятор предназначен для:
- получения знаний по основам робототехники, устройства роботов и способов управления ими;
- получения навыков управления робототехническими устройствами;
- обучения программированию роботов;
- выполнения практических заданий по использованию роботов:
- перемещение объектов;
- построение сложных конструкций;
- программирование траекторий перемещения;
- программирование световой индикации процесса работы робота.
Робот-манипулятор может захватывать и перемещать грузы массой до 30 г следуя Вашим командам.
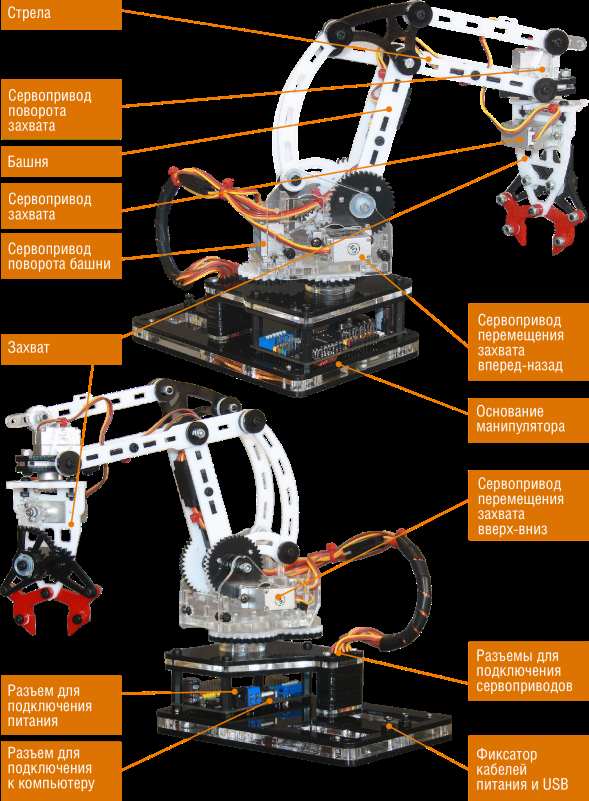
Роботы-манипуляторы моделей RM 002 и RM 001 могут выполнять следующие команды - действия:
- захватывать, удерживать, перемещать груз массой до 30 г с помощью клешни;
- поворачивать башню манипулятора с клешней и грузом вправо и влево от стартового положения;
- перемещать клешню с грузом и без груза с помощью стрелы манипулятора вверх и вниз от стартового положения;
- перемещать клешню с грузом и без груза с помощью стрелы манипулятора вперёд и назад от стартового положения;
- изменять цвет, яркость, режимы световой индикации действий робота с помощью программируемого светодиода.
Команды роботу манипулятору возможно задавать вручную с помощью специализированного программного обеспечения Пульт управления РТУ или с помощью программ. Программы могут быть созданы:
- с использованием блочно-визуального языка программирования,
- с использованием языка Python в интегрированной среде разработки,
- с использованием подключаемой библиотеки Robointellect SDK для программирования на языках Blockly, C++, C, Python, Go, PHP в средах разработки пользователя (устанавливаются пользователем самостоятельно по собственному выбору или с применением рекомендаций в документации по SDK.
Вы можете научиться программировать действия робота-манипулятора, задавать ему определенные последовательности действий с помощью таких программ, например перенести груз на заданное расстояние или сложить несколько разных грузов в заданной последовательности, построить/разобрать заданные или собственные конструкции.
Модель RM 001 является базовой, в нее встроено 4 сервопривода, плата управления, светодиоды и прочие компоненты. RM 001 поставляется в виде конструктора для самостоятельной сборки, в который входя все необходимые компоненты, крепёж, инструменты для самостоятельной сборки робота-манипулятора. Состав набора представлен на рисунке ниже.
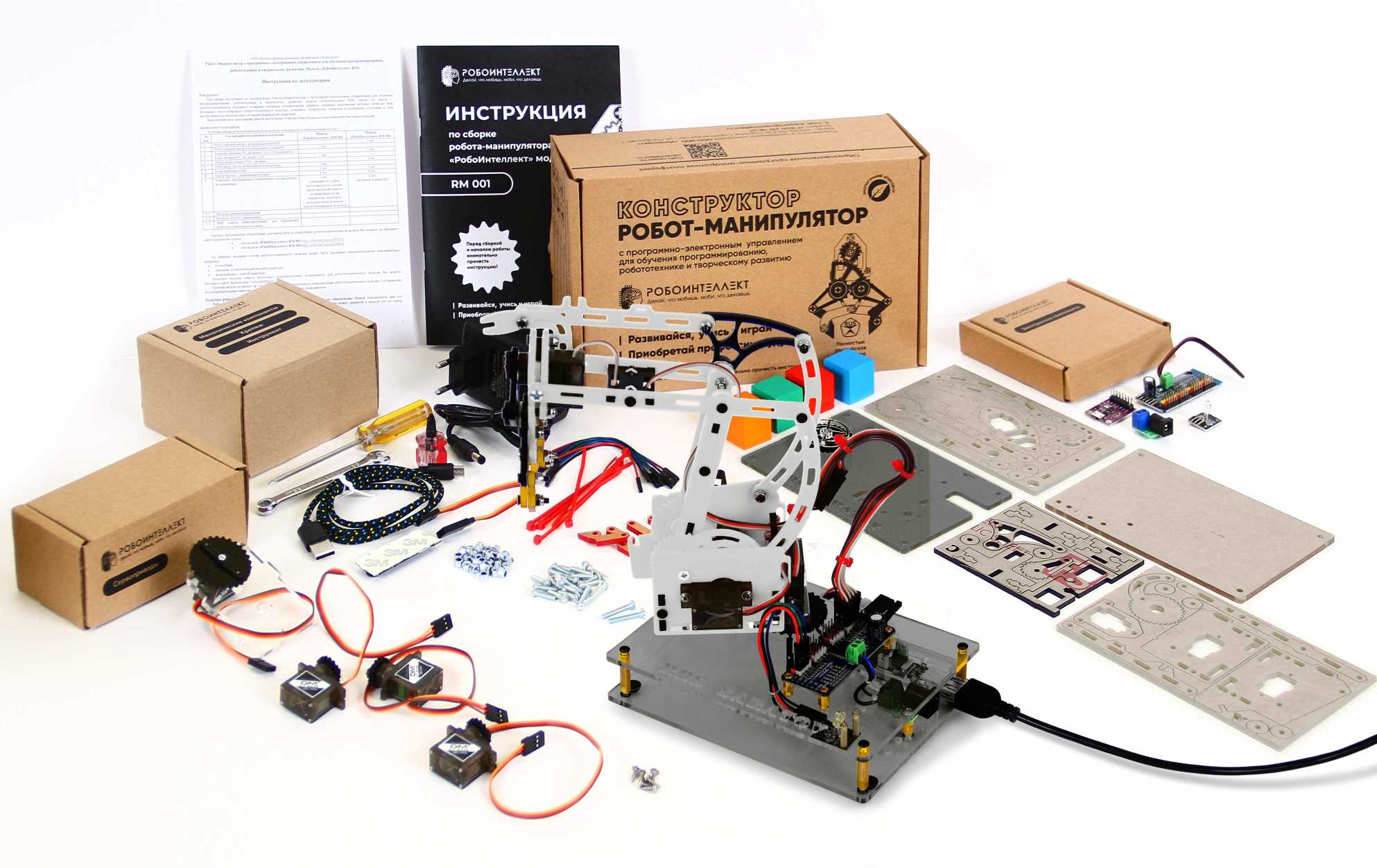
Что быстро и правильно собрать робота в наборе имеется подробная инструкция, а если уж и инструкции не хватит, то вы всегда может обратиться за любой помощью к нам в тех. поддержку.
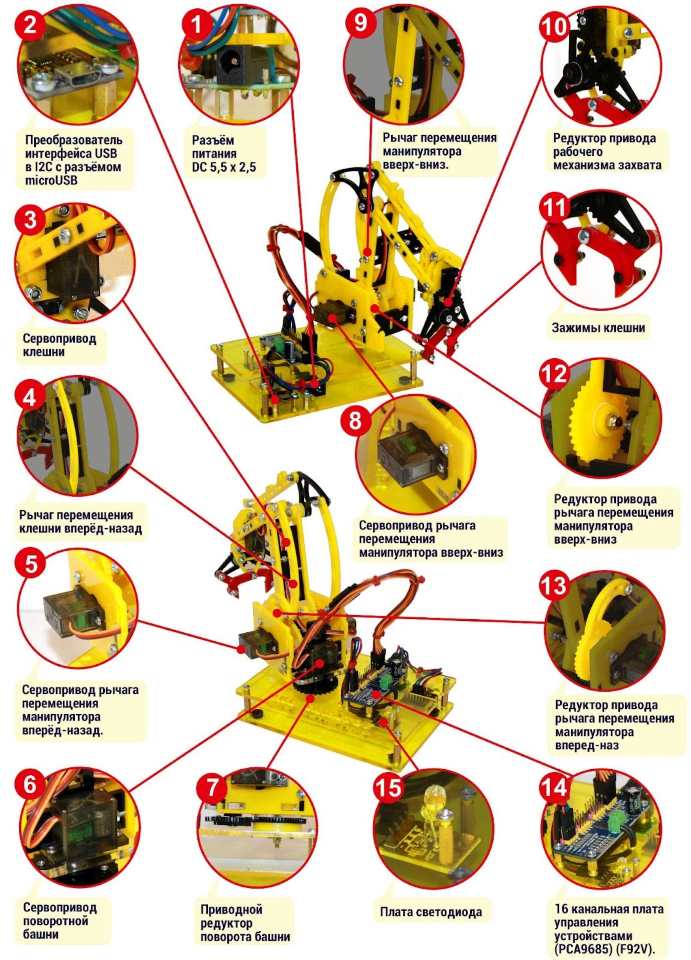
Вот так будет выглядеть собранный Вами робот RM 001 (цвет робота может отличаться в зависимости от партии, но это никак не влияет на его качество и функциональные возможности).
Модель RM 002 обновленная, в ней 5 сервоприводов (5-ый дает возможность поворачивать клешню вокруг своей оси), а так же встроен датчик тока. Датчик тока измеряет какой ток потребляют сервоприводы во время работы, эту информацию он передает по шине данных SPI на ШИМ-контроллер и на компьютер. В программе Пульт управления РТУ потребление тока отображается в виде графика в реальном времени.