Устройство и технические характеристики робота-манипулятора модели RM 001 M02
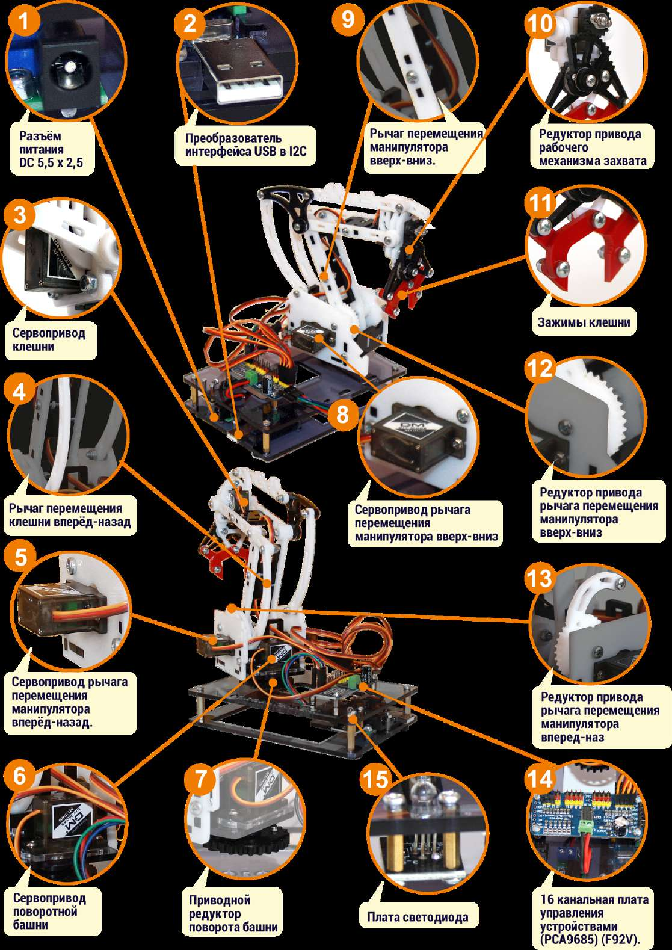
- Разъём питания DC 5,5 x 2,5. Используется для подключения электропитания робота-манипулятора.
- Преобразователь интерфейса USB в I2C c разъёмом USB (CH341T). Используется для подключения робота к компьютеру или ноутбуку по USB.
- Сервопривод клешни. Используется для приведения в движение зажимов клешни для захвата или освобождения груза.
- Рычаг перемещения манипулятора вперёд-назад. Используется для перемещения манипулятора вперёд и назад.
- Сервопривод рычага перемещения манипулятора вперёд-назад Используется для приведения рычага перемещения манипулятора вперёд и назад в движение.
- Сервопривод поворотной башни. Используется для поворота башни.
- Приводной редуктор поворота башни. Используется для передачи крутящего момента от сервопривода поворотной башни к самой поворотной башне. Передаточные числа редуктора 1:1.
- Сервопривод рычага перемещения манипулятора вверх-вниз. Используется для приведения рычага перемещения манипулятора вверх и вниз в движение.
- Рычаг перемещения манипулятора вверх-вниз. Используется для перемещения манипулятора вверх и вниз.
- Редуктор привода рабочего механизма захвата. Используется для перемещения зажимов клешни для захвата и удержания груза.
- Зажимы клешни. Используются для захвата и удержания груза.
- Редуктор привода рычага перемещения манипулятора вверх-вниз. Используется для передачи крутящего момента от вала сервопривода рычагу перемещения клешни вверх и вниз от сервопривода.
- Редуктор привода рычага перемещения манипулятора вперед-назад. Используется для передачи крутящего момента от вала сервопривода рычагу перемещения манипулятора вперед и назад.
- 16 канальная плата управления устройствами (PCA9685) (F92V). Используется для управления исполнительными устройствами робота-манипулятора (например: светодиод, сервоприводы). Входной интерфейс управления I2C. Управление устройствами на выходе драйвера осуществляется по 16 каналам широтно-импульсной модуляцией.
- Плата светодиода. Используется для индикации действий робота-манипулятора. Цвет, яркость и режим работы светодиода могут программироваться.
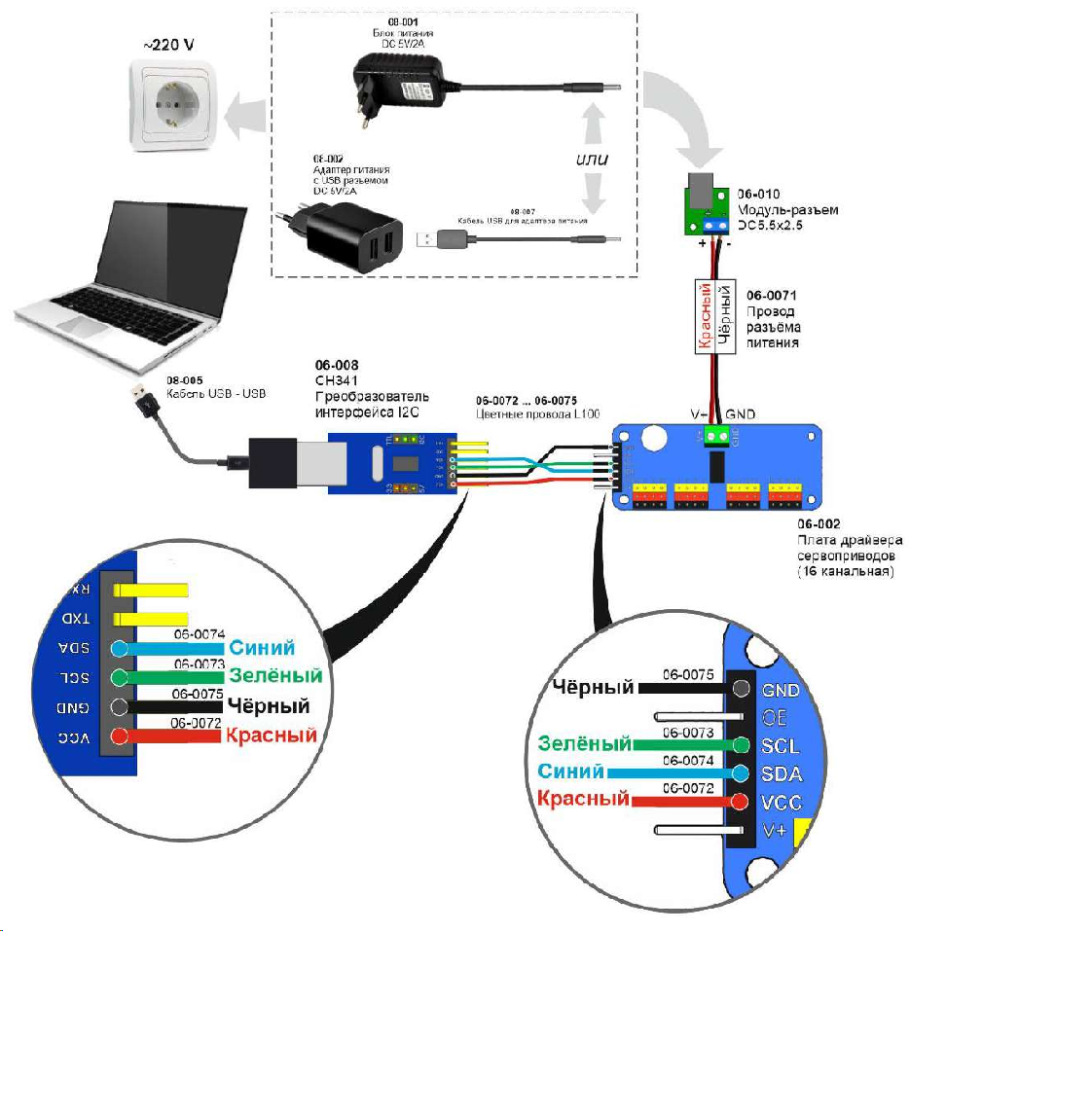
Схема соединения электронных компонентов