RI_SDK_exec_RServoDrive_State #
Описание метода #
Метода чтения состояния сервопривода вращения.
Чтение состояния сервопривода. Получает значение состояния сервопривода и записывает его в переданную переменную. Блок принимает переменную числового типа в которую записывает 0 или 1.
Коды состояния:
0 - Сервопривод ожидает вызова действий. Сервопривод ничего не делает и готов к работе.
1 - Компонент выполняет действие. Сервопривод в данный момент осуществляет движение.
Для своей работы блок чтения состояния сервопривода вращения использует метод библиотеки RISDK.
Примеры #
В данном примере получаем создаем переменную «state», записываем в нее состояние сервопривода вращения и затем выводим в терминал.
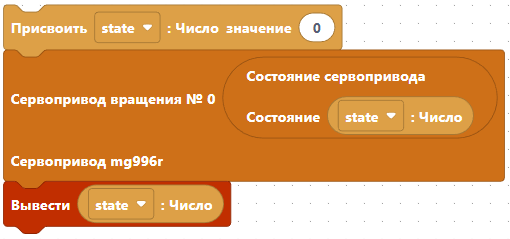
В результате работы программы будут выведены такие строки:
«Сервопривод вращения №0 | Состояние: 0 (Ожидает) »
«Печать: 0 »