Описание метода #

Позволяет вернуть робота в стартовое положение с помощью одной команды.
Это часто необходимо при последовательном выполнении разных программ, чтобы каждая из них могла начинать работу с одинакового положения робота.
Блок имеет разные режимы работы:
Стартовое положение для модели RM 001 #
В режиме для модели RM 001 метод посылает управляющие команды в соответствии с техническими характеристиками и моделями компонентов РТУ "RM 001", на сервоприводы подключенные к ШИМ с адресом 0x40 на портах 0-4. Метод создает собственные компоненты библиотеки RISDK, без использования инициализированных в программе I2C, ШИМ или сервоприводов.
Этот режим предназначен для работы с устройством RM 001 или устройствами у которых I2C, ШИМ или сервоприводы собраны также.
Приведены технические характеристики подобного устройства:
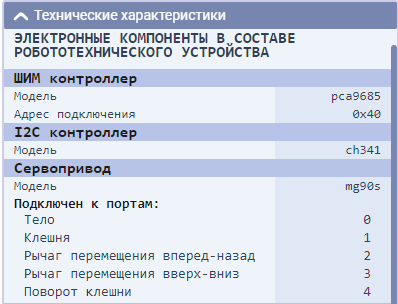
Пример для модели RM 001:
Стартовое положение для созданных сервоприводов #
В режиме созданных сервоприводов блок работает только с объявленными в своей программе, в поле инициализации в блоке инициализации и выполнения компонентами.
Определяются все созданные в программе дескрипторы сервоприводов для которых применяется метод библиотеки RISDK разворачивающий их в середину рабочего диапазона. Таким образом, если в вашей программе не инициализировано ни одного компонента сервопривода или они инициализированы на портах к которым ничего не подключено, то в результате работы блока поворота сервоприводов в начальное положение ничего не произойдет.
Данный режим более универсальным чем предыдущий, но для его корректного использования требуется указать адрес и порты подключений сервоприводов в поле инициализации. Режим предназначен для работы с устройствами, чья сборка или модели компонентов будут отличаться от устройства RM 001.
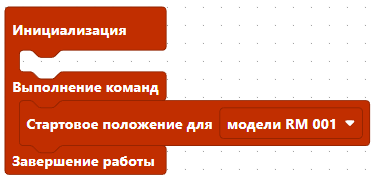
Пример для модели инициализированных сервоприводов:
