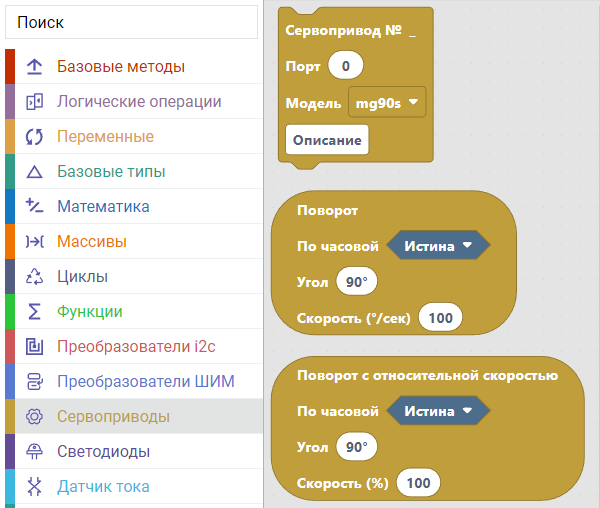
| Инициализация сервопривода |
Инициализация сервопривода известной модели или кастомного сервопривода. |
| Вращение сервопривода |
Выполняет вращение сервопривода с заданной угловой скоростью до тех пор, пока не будет достигнут максимальный или минимальный угол сервопривода. |
| Вращение с относительной скоростью |
Вращение сервопривода с заданной относительной скоростью до тех пор, пока не будет достигнут максимальный или минимальный угол сервопривода. |
| Поворот на минимальный шаг |
Выполняет поворот сервопривода на минимальный шаг с заданной угловой скоростью. |
| Поворот сервопривода |
Поворот сервопривода на заданный угол с заданной угловой скоростью. |
| Поворот с относительной скоростью |
Поворот сервопривода на заданный угол с заданным процентом от максимальной скорости. |
| Поворот по шагам сервопривода |
Абсолютный поворот. Угол задается через кол-во шагов сервопривода. |
| Поворот по импульсу |
Абсолютный поворот. Угол задается через значение импульса. |
| Остановка сервопривода |
Выполняет остановку поворота сервопривода. |
| Поворот в середнее положение |
Выполняет поворот в середину рабочего диапазона. |