RI_SDK_connector_i2c_WriteBytes
Описание метода #
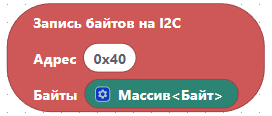
Выполняет запись байтов на адрес I2C коннектора.
Внутри блока происходят следующие действия:
-
Блок I2C коннектора возвращает дескриптор, который указывает на адрес I2C адаптера.
-
Вызванный адаптер открывает новое соединение по адресу, заданному в блоке записи байтов. Соединение открывается с помощью метода RISDK. Создание нового подключения по какому-либо адресу необходимо делать перед тем, как производить чтение/запись по этому адресу.
-
Переданный массив байтов записывается через I2C адаптер по указанному адресу. Запись происходит с помощью метода RISDK.
-
Выводиться сообщение о том сколько байт было записано.
Если в процессе выполнения одного из действий происходит ошибка, в терминал будет выведено сообщение о ней.
Принимаемые значения #
Блок принимает значение типа байт - адрес на шине I2C, по которому будет записывать массив байтов. А так же сам массив байтов в виде базового блока массива или же блок переменной нужного типа.
Примеры #
Простейший пример использования блока записи байтов. Где адрес 0х40 это порт ШИМ, первый байт массива это адрес сервопривода базы робота, второй и третий байты задают значения скважности on, а четвертый и пятый задают скважность off.
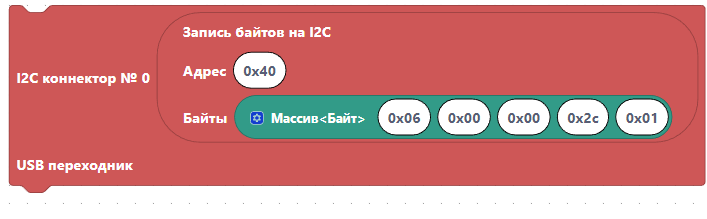
В результате работы приведенной команды робот повернется на 90° и в терминал будет выведена строчка: « I2C коннектор №0 | Записано байт: 5 »
Следующий пример это демо программа «Поворот с помощью записи байт» в которой используются блоки записи байт. Адрес 0х40 указывает на ШИМ преобразователь на шине I2C. Переданные в блок массивы адресуется по правилам конкретной модели ШИМ (в роботе используется плата PCA9685), посмотреть которые можно здесь.
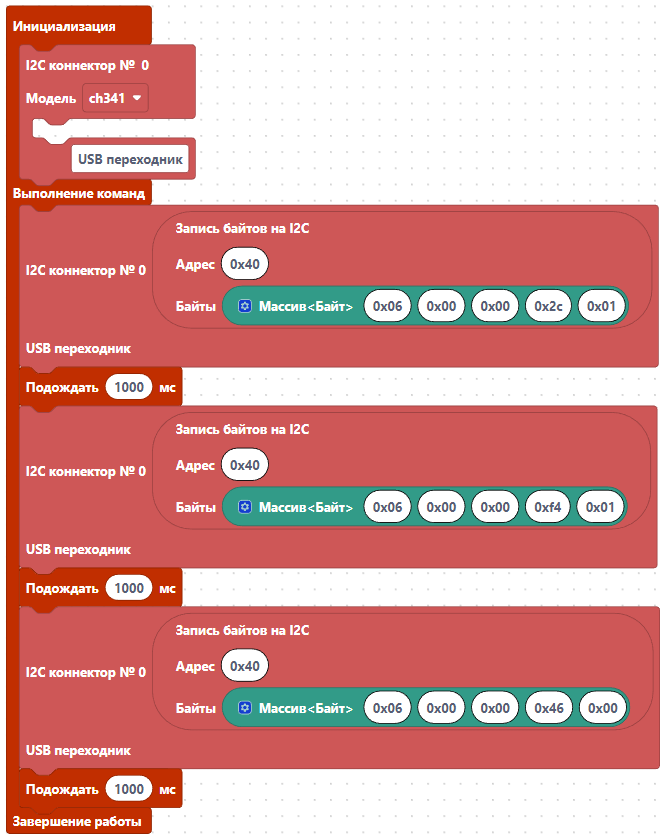
В результате работы программы будет выведено следующие сообщение:
« Инициализация началась. I2C преобразователь №0 инициализирован. Инициализация закончилась. Выполнение действий началось. I2C коннектор №0 | Записано байт: 5 Ожидание 1000 миллисекунд I2C коннектор №0 | Записано байт: 5 Ожидание 1000 миллисекунд I2C коннектор №0 | Записано байт: 5 Ожидание 1000 миллисекунд Выполнение действий закончилось. Программа завершилась.»
И стрела робота последовательно повернется сначала на 90°, потом на 180°, а затем вернется в начальное положение.