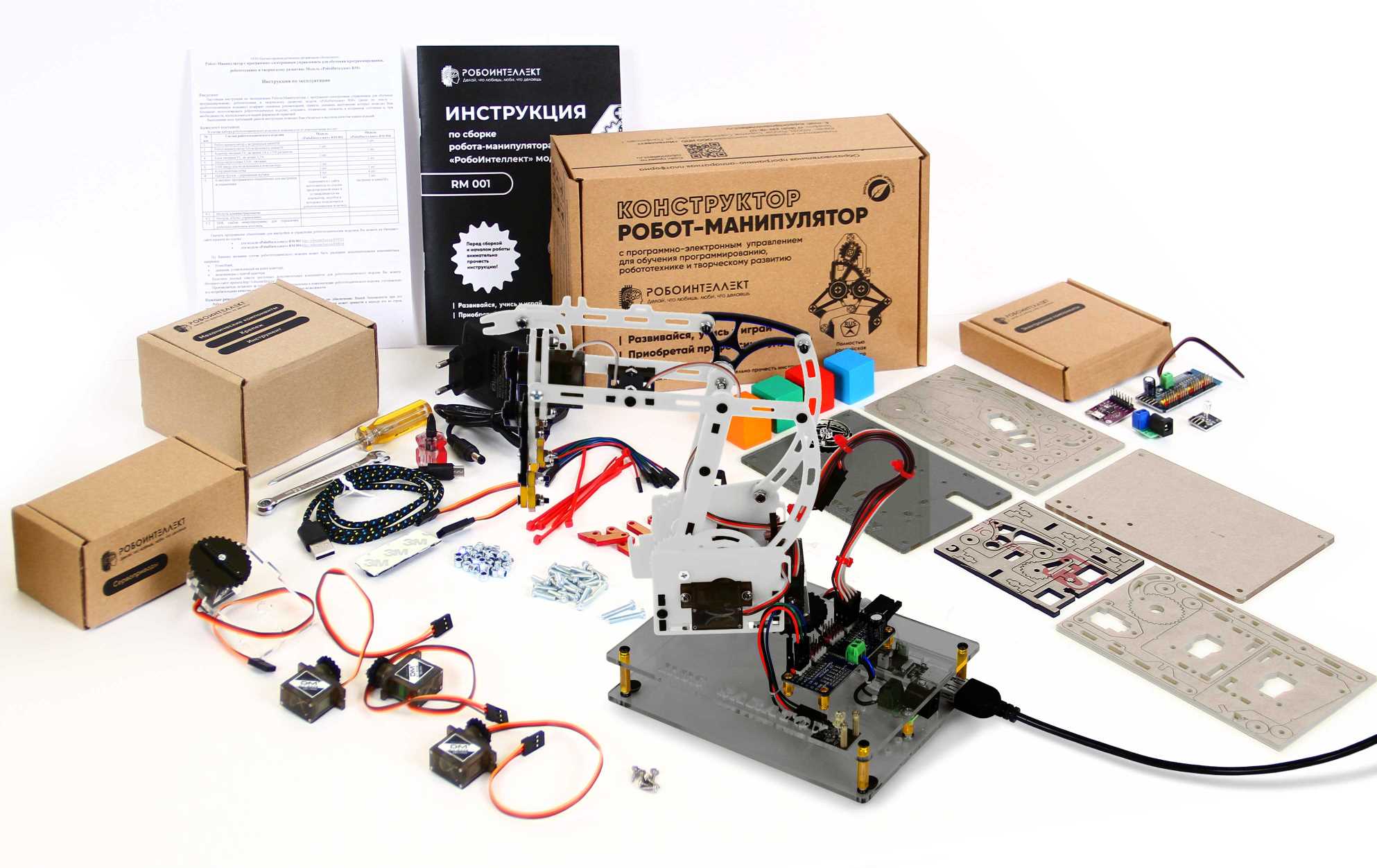
Робот-манипулятор модели RM001 поставляется в виде конструктора для самостоятельной сборки Это самый простой робот в проекте “РобоИнтеллект”, однако он является точной моделью промышленного робота-манипулятора, имеет такие же основные узлы - сервоприводы, электронную плату управления, редукторы, подшипники скольжения, захват для перемещения груза.
В наборе Вы найдёте всё необходимое для сборки такого робота. Сама сборка, по опыту, занимает 5 - 6 часов. Детям младше 10 лет потребуется помощь взрослых.
Как быстро и правильно собрать робота изложено в подробной инструкции по сборке. Просто следуйте рекомендациям инструкции и у Вас получится готовый робот-манипулятор.
Далее Вы можете скачать с сайта проекта специализированное программное обеспечение “Пульт управления”, которое позволит Вам управлять роботом, разрабатывать программы управления и подключить его он-лайн сервису “РобоИнтеллект”, чтобы управлять роботом дистанционно из любой точки, где есть Интернет.
Приобрести такой набор Вы можете в Интернет магазине проекта “РобоИнтеллект”, на площадках “Озон”, Яндекс-маркет, Алиэкспресс. В Республике Беларусь Вы можете приобрести набор в Интернет магазине проекта
Состав набора представлен на рисунке ниже:
Вот так будет выглядеть собранный робот (цвет может отличаться в зависимости от партии, но это никак не влияет на качество робота и его функциональные возможности.
 Назначение
Назначение
Робот манипулятор RM 001 M02 предназначен для:
- получения знаний по основам робототехники, устройства роботов и способов управления ими;
- получения навыков управления робототехническими устройствами;
- обучения программированию роботов;
- выполнения практических заданий по использованию роботов:
- перемещение объектов;
- построение сложных конструкций;
- программирование траекторий перемещения;
- программирование световой индикации процесса работы робота.
Робот-манипулятор может захватывать и перемещать грузы массой до 30 г следуя Вашим командам.
Робот-манипулятор модели RM 001 M02 может выполнять следующие команды - действия:
- захватывать, удерживать, перемещать груз массой до 30 г с помощью клешни;
- поворачивать башню манипулятора с клешней и грузом вправо и влево от стартового положения;
- перемещать клешню с грузом и без груза с помощью стрелы манипулятора вверх и вниз от стартового положения;
- перемещать клешню с грузом и без груза с помощью стрелы манипулятора вперёд и назад от стартового положения;
- изменять цвет, яркость, режимы световой индикации действий робота с помощью программируемого светодиода.
Команды роботу манипулятору возможно задавать вручную с помощью специализированного
программного обеспечения “Пульт управления РТУ” или с помощью программ. Программы могут быть созданы:
- с использованием блочно-визуального языка программирования,
- с использованием языка Python в интегрированной среде разработки,
- с использованием подключаемой библиотеки RI_SDK для программирования на языках Blockly, C++, C, Python, Go, PHP в средах разработки пользователя (устанавливаются пользователем самостоятельно по собственному выбору или с применением рекомендаций в документации по SDK).
Вы можете научиться программировать действия робота-манипулятора, задавать ему определенные последовательности действий с помощью таких программ, например перенести груз на заданное расстояние или сложить несколько разных грузов в заданной последовательности, построить/разобрать заданные или собственные конструкции.
Устройство #
Устройство и технические характеристики робота-манипулятора модели RM 001 M02 #
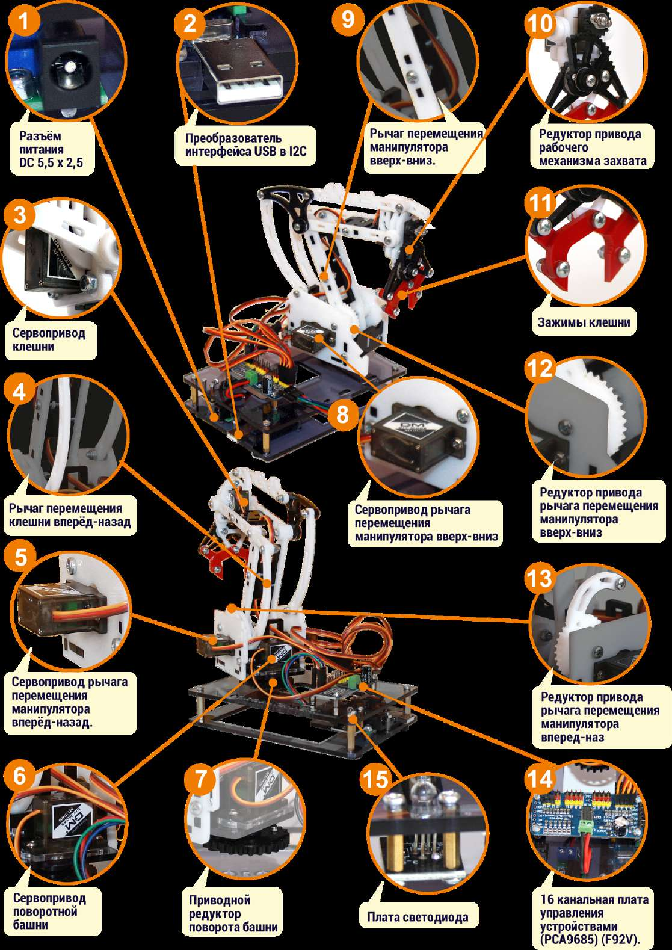
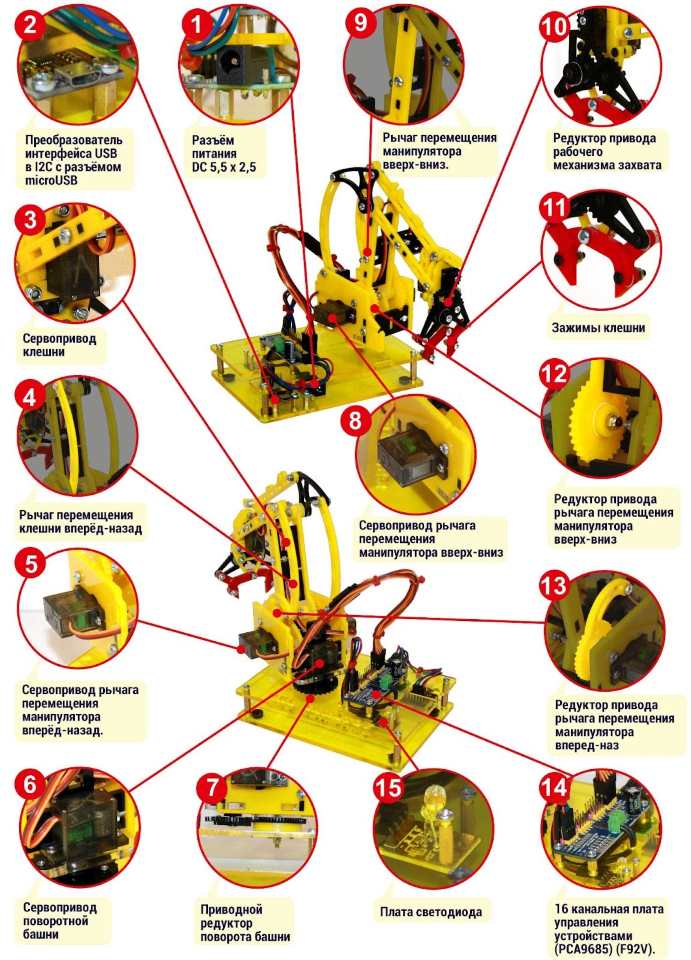
- Разъём питания DC 5,5 x 2,5. Используется для подключения электропитания робота-манипулятора.
- Преобразователь интерфейса USB в I2C c разъёмом USB (CH341T). Используется для подключения робота к компьютеру или ноутбуку по USB.
- Сервопривод клешни. Используется для приведения в движение зажимов клешни для захвата или освобождения груза.
- Рычаг перемещения манипулятора вперёд-назад. Используется для перемещения манипулятора вперёд и назад.
- Сервопривод рычага перемещения манипулятора вперёд-назад Используется для приведения рычага перемещения манипулятора вперёд и назад в движение.
- Сервопривод поворотной башни. Используется для поворота башни.
- Приводной редуктор поворота башни. Используется для передачи крутящего момента от сервопривода поворотной башни к самой поворотной башне. Передаточные числа редуктора 1:1.
- Сервопривод рычага перемещения манипулятора вверх-вниз. Используется для приведения рычага перемещения манипулятора вверх и вниз в движение.
- Рычаг перемещения манипулятора вверх-вниз. Используется для перемещения манипулятора вверх и вниз.
- Редуктор привода рабочего механизма захвата. Используется для перемещения зажимов клешни для захвата и удержания груза.
- Зажимы клешни. Используются для захвата и удержания груза.
- Редуктор привода рычага перемещения манипулятора вверх-вниз. Используется для передачи крутящего момента от вала сервопривода рычагу перемещения клешни вверх и вниз от сервопривода.
- Редуктор привода рычага перемещения манипулятора вперед-назад. Используется для передачи крутящего момента от вала сервопривода рычагу перемещения манипулятора вперед и назад.
- 16 канальная плата управления устройствами (PCA9685) (F92V). Используется для управления исполнительными устройствами робота-манипулятора (например: светодиод, сервоприводы). Входной интерфейс управления I2C. Управление устройствами на выходе драйвера осуществляется по 16 каналам широтно-импульсной модуляцией.
- Плата светодиода. Используется для индикации действий робота-манипулятора. Цвет, яркость и режим работы светодиода могут программироваться.
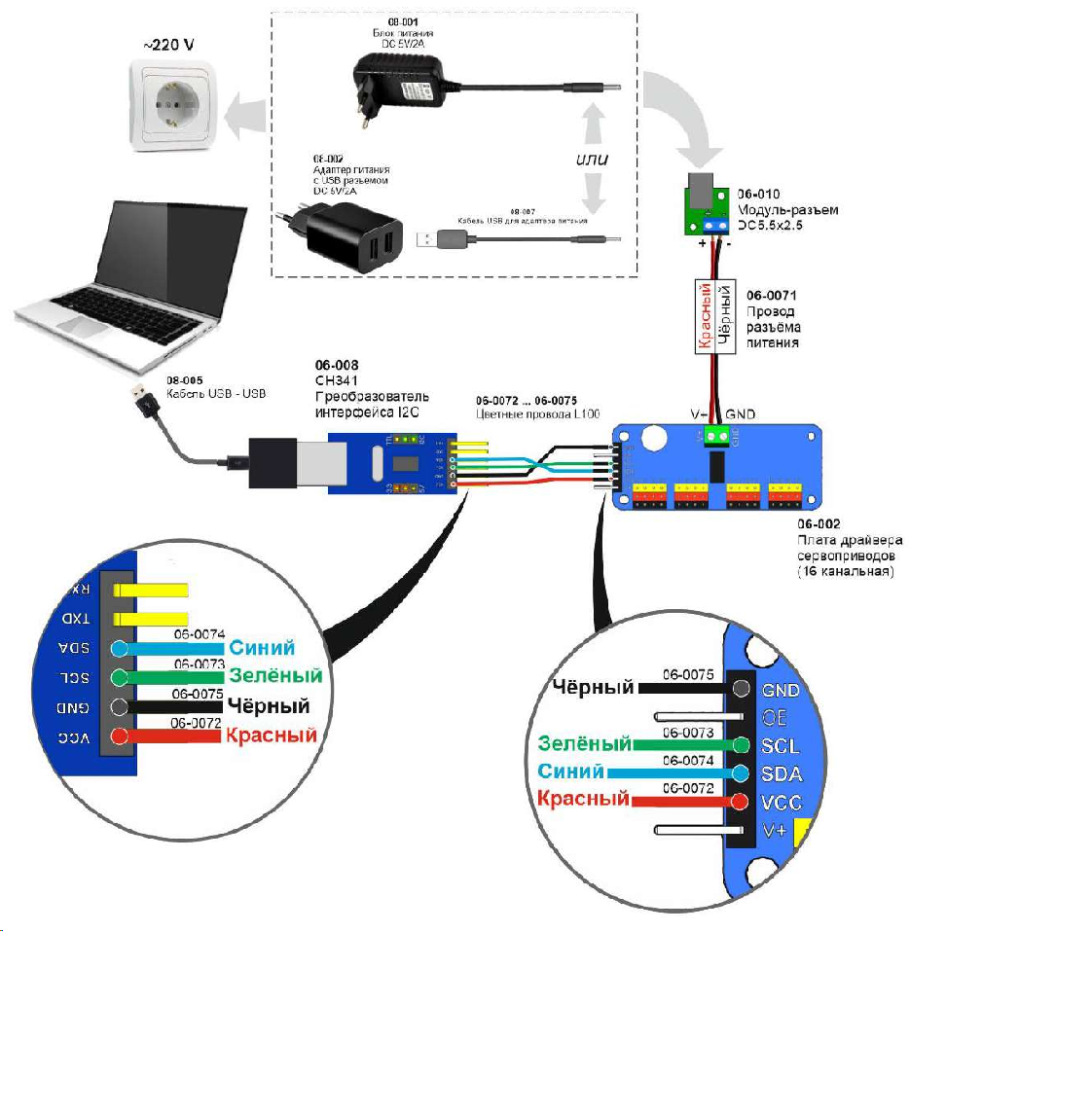
Схема соединения электронных компонентов #
 Подключение
Подключение
Для начала работы с роботом необходимо:
1. Подключите робот к компьютеру или ноутбуку через порт USB с помощью кабеля USB — microUSB, входящего в состав набора.
2. Подключите робот-манипулятор к электрической сети. Ваш робот-манипулятор может комплектоваться блоком питания или USB адаптером питания со шнуром USB.
2.1. Если Ваш робот-манипулятор укомплектован блоком питания, подключите штекер шнура блока питания к разъёму питания робота-манипулятора DC 5,5 x 2,5 как показано на рисунке ниже.
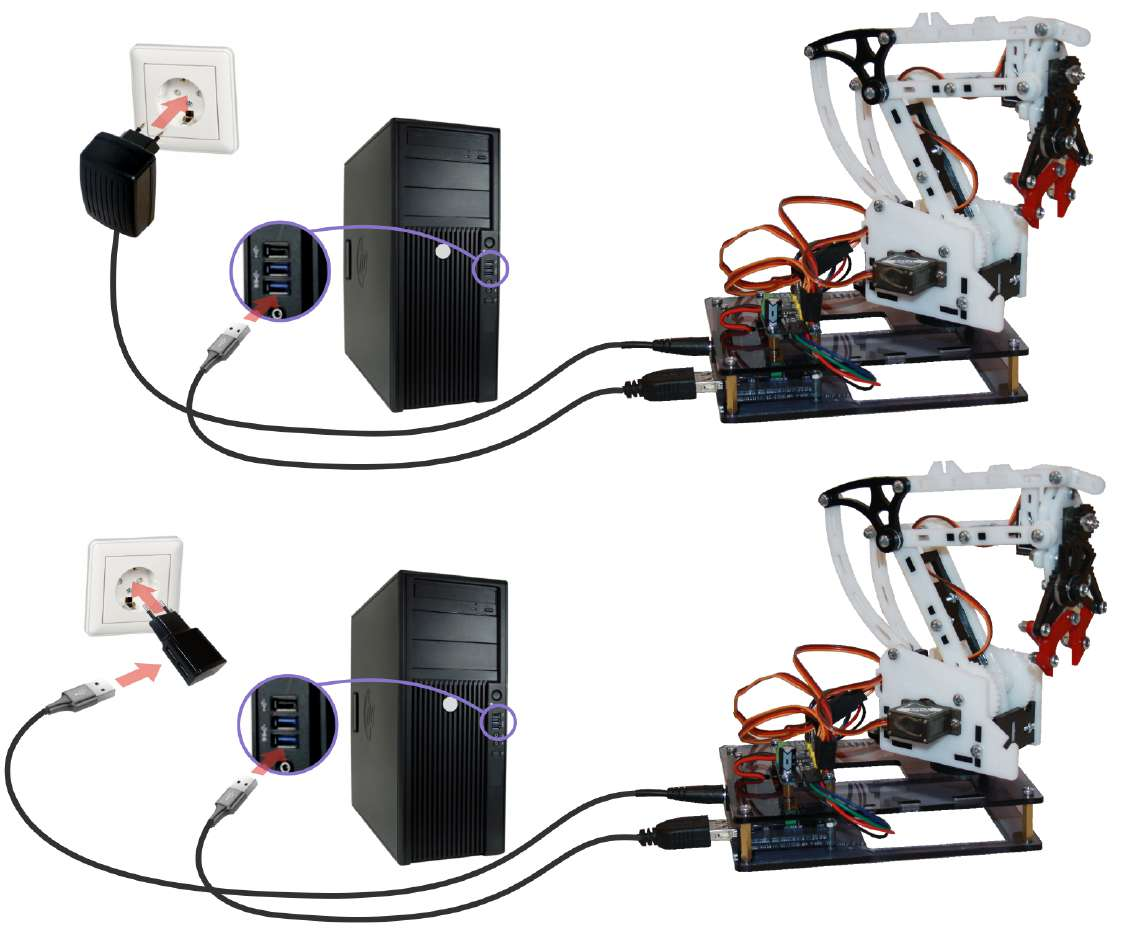
2.2. Если Ваш робот-манипулятор укомплектован USB адаптером питания, подключите USB разъём шнура питания к USB адаптеру, штекер питания USB шнура питания к разъёму питания робота-манипулятора DC 5,5 x 2,5 как показано на рисунке выше.
Внимание! Подключайте блок питания или адаптер питания робота-манипулятора только к сети переменного тока напряжением 220+-22В с частотой 50 Гц. Будьте осторожны с электричеством.
3. Установите программное обеспечение “Пульт управления РТУ” согласно руководства, приведённого в разделе “Установка программного обеспечения”
4. Проверьте стартовое положение робота. При необходимости откалибруйте стартовое положение согласно руководства, приведённого в разделе “Калибровка сервоприводов робота”
Калибровка и позиционирование сервоприводов
Калибровка сервоприводов робота #
Зачем нужна калибровка сервоприводов #
Калибровка робота - это установка его стартового или начального положения.
Для чего это необходимо?
В процессе выполнения заданий или написания программ Вы будете давать роботу команды, например, перенести груз из одной точки в другую. Расстояние между точками расположения груза Вы, конечно, будете измерять в сантиметрах или миллиметрах. Параметры же перемещения рычагов робота сервоприводами измеряются в градусах.
Таким образом, Вам будет необходимо точно рассчитать на сколько градусов влево или вправо, вверх или вниз, вперёд или назад робот должен переместить клешню для захвата или освобождения груза. И чтобы точно попасть в место, где нужно захватить или освободить груз необходимо знать, откуда, с какого местоположения башни и (или) манипулятора робот должен начинать отсчитывать своё передвижение.
Такое стартовое или начальное местоположение устанавливается для каждого сервопривода:
➢ управляющего поворотом башни направо или налево;
➢ управляющего рычагом манипулятора для перемещения клешни вверх или вниз;
➢ управляющего рычагом манипулятора для перемещения клешни вперёд или назад;
➢ управляющего захватом клешни.
В таком положении считается, что текущее перемещение башни или манипулятора равно 0. Дальше при движении из начального положения увеличиваются (для перемещения по часовой стрелке) или уменьшаются (для перемещения против часовой стрелки) значения угла перемещения в градусах.
Стартовое или начальное положение сервоприводов робота устанавливается при изготовлении. Но в процессе транспортировки или погрешностей при сборке робота из набора, стартовое положение башни и (или) рычагов манипулятора может сместиться.
Калибровка необходима для установки верного стартового (начального) положения сервоприводов робота.
Как проверить верность стартового (начального) положения робота #
Для проверки верности стартового (начального) положения сервоприводов робота, робот необходимо установить в стартовое положение. Это возможно двумя способами:
Первый. Робот автоматически устанавливается в стартовое (начальное) положение при включении питания.
Второй. Для принудительной установки робота в стартовое положение в процессе работы, необходимо нажать кнопку «Меню» пульта управления и выбрать пункт «Стартовое положение».

Установив сервоприводы робота в стартовое положение необходимо проверить, как расположены башня, рычаги манипулятора и клешня.
Проверка правильности положения башни манипулятора #
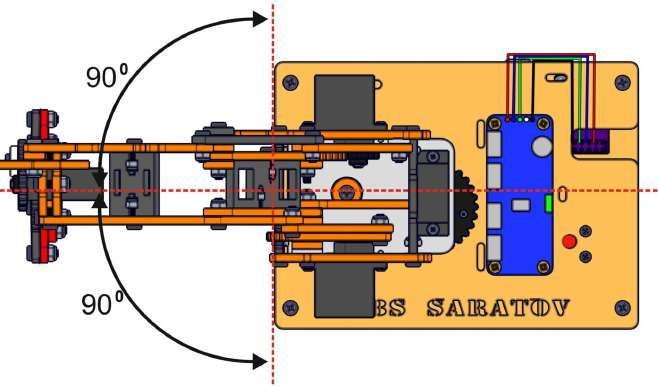
Поворотная башня робота в стартовом (начальном) положении должна располагаться перпендикулярно короткой стороне основания. Допускаются отклонения не более 2 градусов от перпендикуляра.
В случае, если угол расположения башни относительно основания отличается от перпендикулярного больше допустимых значений, требуется калибровка сервопривода поворота башни.
Проверка правильности положения рычага перемещения клешни вверх и вниз #
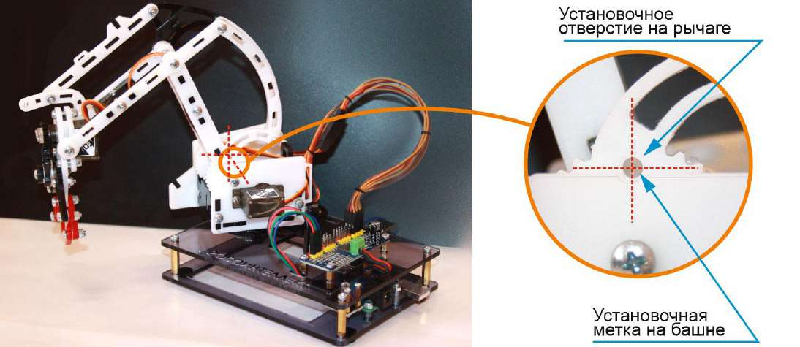
Верность стартового (начального) расположения рычага перемещения клешни вверх и вниз проверяется взаимным расположением установочных отметок на левой стороне башни робота и рычаге перемещения вверх, вниз. Отметки должны находится на одной прямой линии. Допускаются отклонения не более 2 градусов от прямой линии.
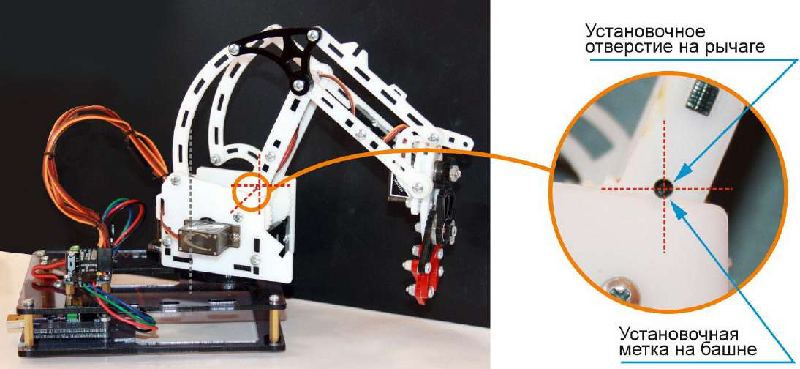
В случае, если установочные метки смещены относительно прямой линии вправо или влево больше допустимых значений, требуется калибровка сервопривода рычага перемещения вверх, вниз.
Проверка правильности положения рычага перемещения клешни вперёд и назад #
Верность стартового (начального) расположения рычага перемещения клешни вперёд и назад проверяется взаимным расположением установочных отметок на правой стороне башни робота и рычаге перемещения вперёд, назад. Отметки должны находится на одной прямой линии. Допускаются отклонения не более 2 градусов от прямой линии.
В случае, если установочные метки смещены относительно прямой линии вправо или влево больше допустимых значений, требуется калибровка сервопривода рычага перемещения вперёд, назад.
Проверка правильности положения рук клешни #
Верность стартового (начального) расположения рук клешни проверяется взаимным расположением установочных отметок на секторе клешни и шестерни её сервопривода. Отметки должны находится на одной прямой линии. Допускаются отклонения не более 2 градусов от прямой линии.
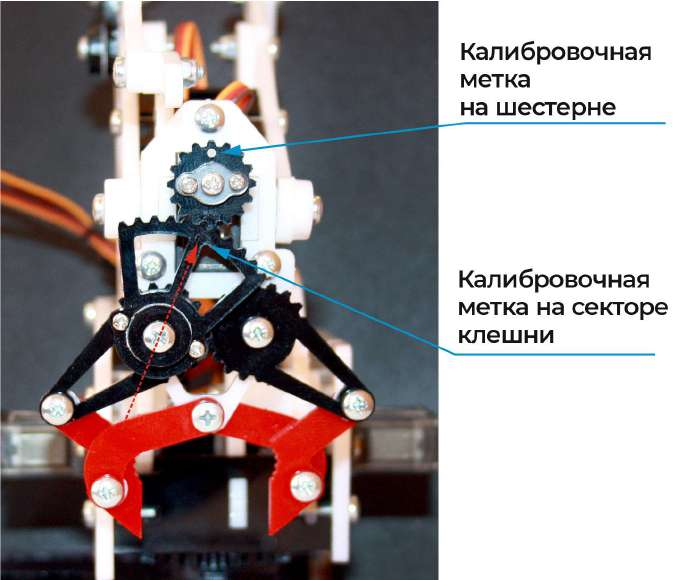
В случае, если установочные метки смещены относительно прямой линии вправо или влево больше допустимых значений, требуется калибровка сервопривода перемещения рук клешни.
Как калибровать сервоприводы робота #
Для начала калибровки необходимо нажать кнопку меню
и выбрать пункт «Режим калибровки».
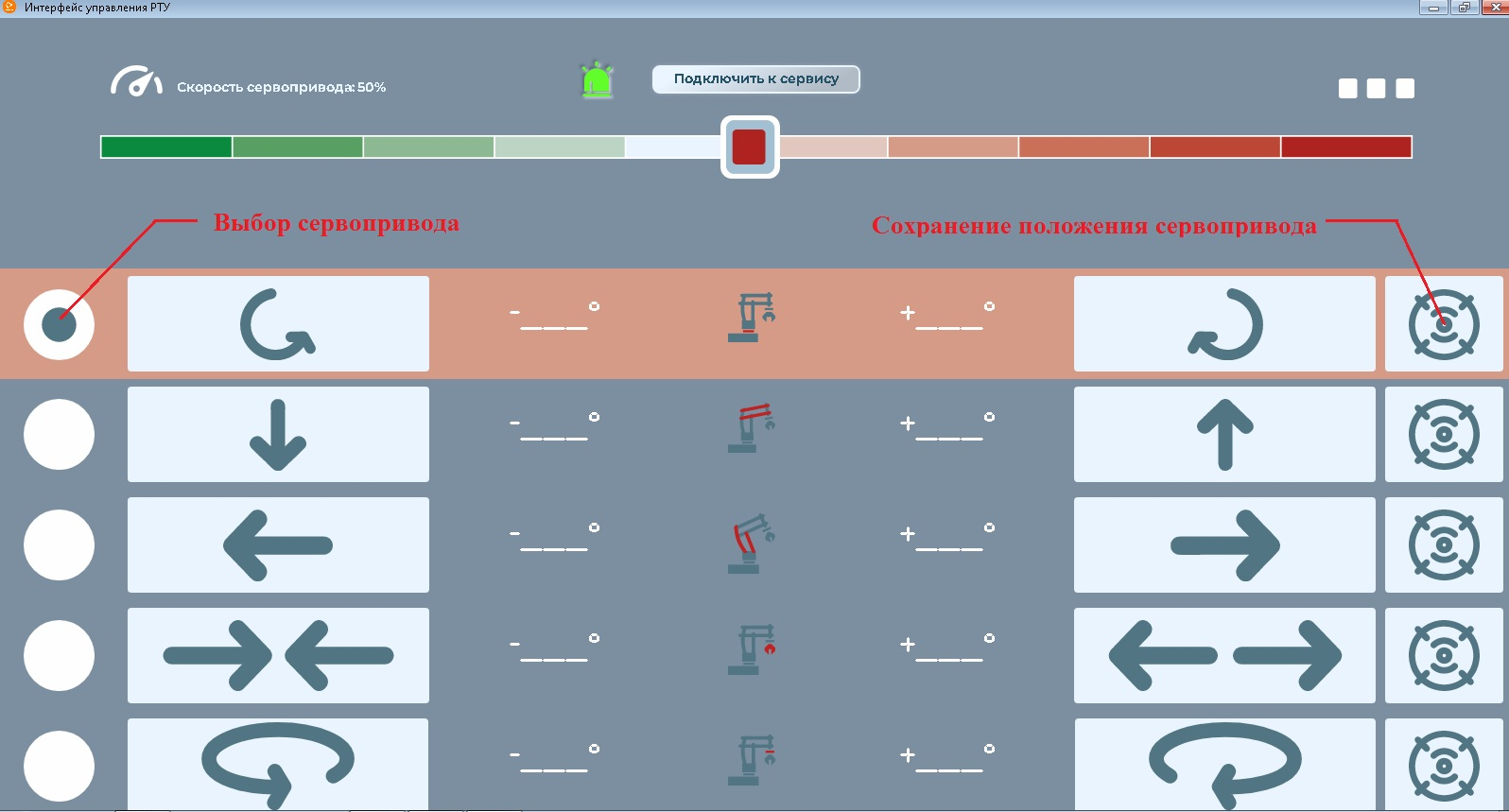
В режиме калибровки на пульте управления слева необходимо выбрать сервопривод, который Вы хотите откалибровать. Затем с помощью кнопок управления установите сервопривод в требуемое положение и сохраните установленное значение с помощью кнопки , расположенной справа.
, расположенной справа.
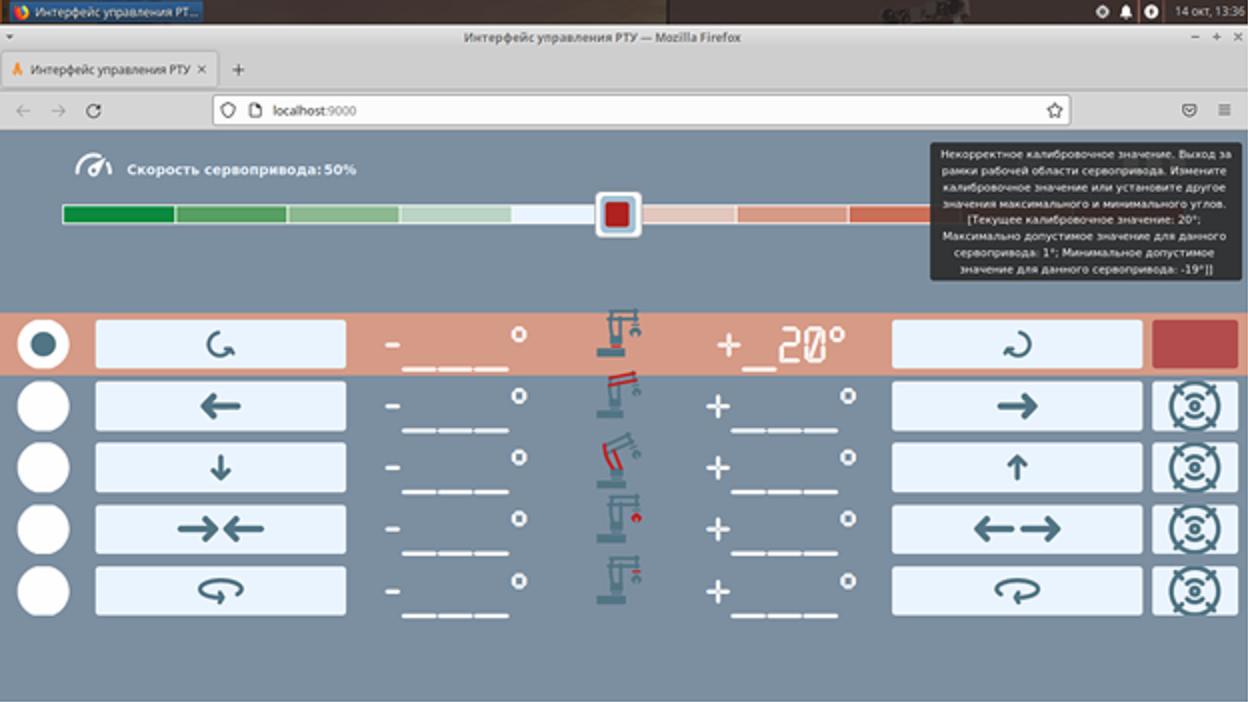
Если при установке положения сервопривода Вы вышли за допустимые пределы, то отобразится сообщение об ошибке, где будет указано допустимое положение сервопривода и выбранное Вами. В этом случае необходимо подобрать положение, не выходящее за рамки допустимого.Для выхода из режима калибровки необходимо нажать кнопку «Меню» и выбрать пункт «Выключить режим калибровки».
!!! ВНИМАНИЕ
Режим калибровки работает только в стандартном варианте интерфейса пульта управления.
Позиционирование сервоприводов #
Зачем нужно позиционирование сервоприводов #
Перед тем как в первый раз начать работу с новым роботом или роботом после ремонта и замены сервоприводов, необходимо провести юстировку сервоприводов, установив их в начальное положение.Для этой операции используется позиционирование сервоприводов.
Выполнение позиционирования сервоприводов #
Подключите робота имеющимся в наборе кабелем USB к Вашему ПК и запустить пульт управления РТУ. Перейти в настройки и выбрать модель сервопривода, установленного на Вашем роботе. Модель сервопривода указана на коробке от робота.
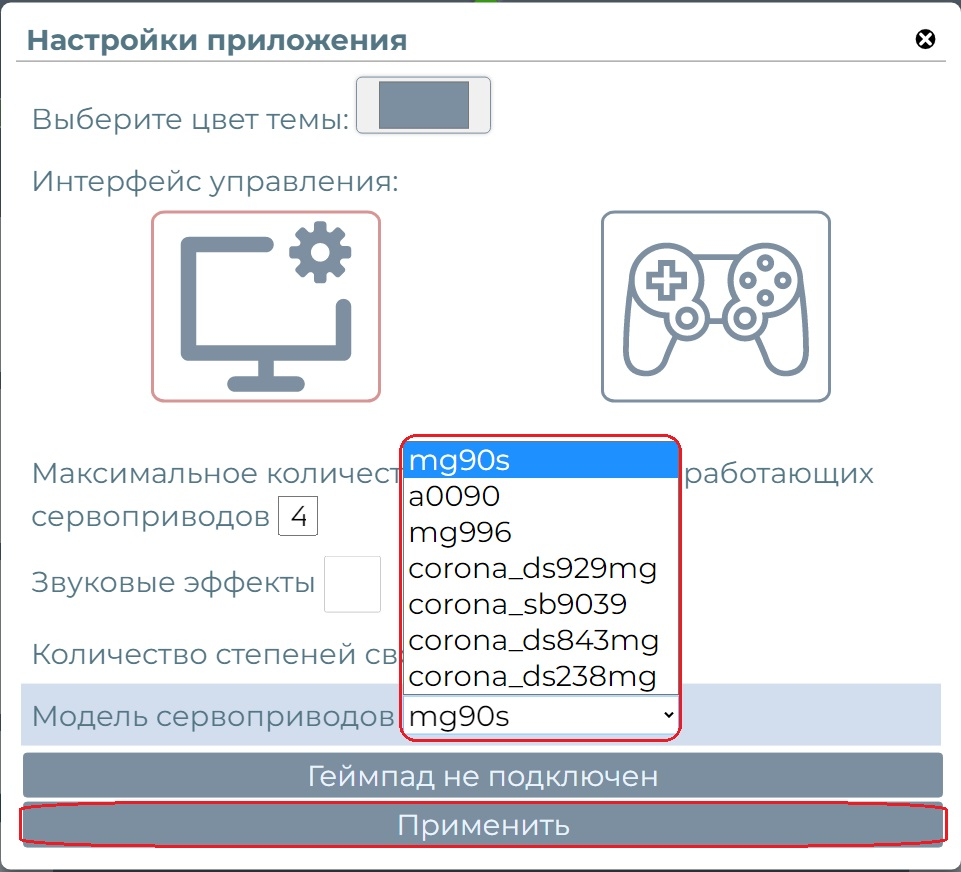
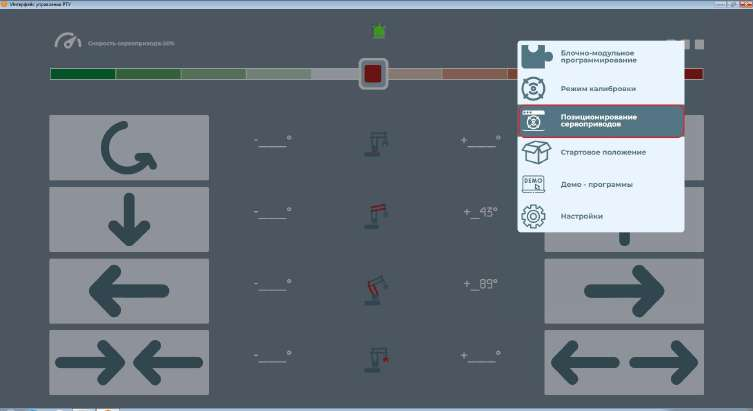
После выбора модели сервопривода из выпадающего списка нажать кнопку “Применить” и закрыть окно настроек. Далее в меню выбрать пункт “Позиционирование сервоприводов”
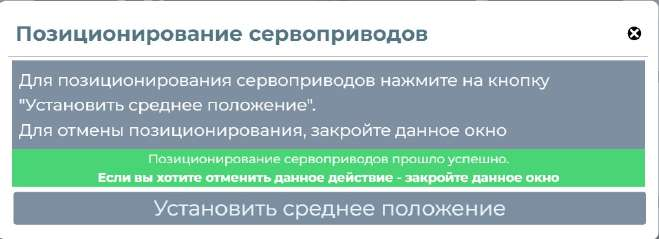
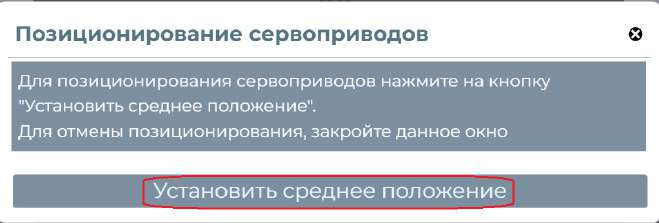
Затем в открывшемся окне нажать кнопку “Установить среднее положение”. Подключенные сервоприводы будут установлены в среднее положение. Появится сообщение об успешном позиционировании сервоприводов. Для того чтобы отменить позиционирование необходимо закрыть окно позиционирования.
 Ручное управление
Ручное управление
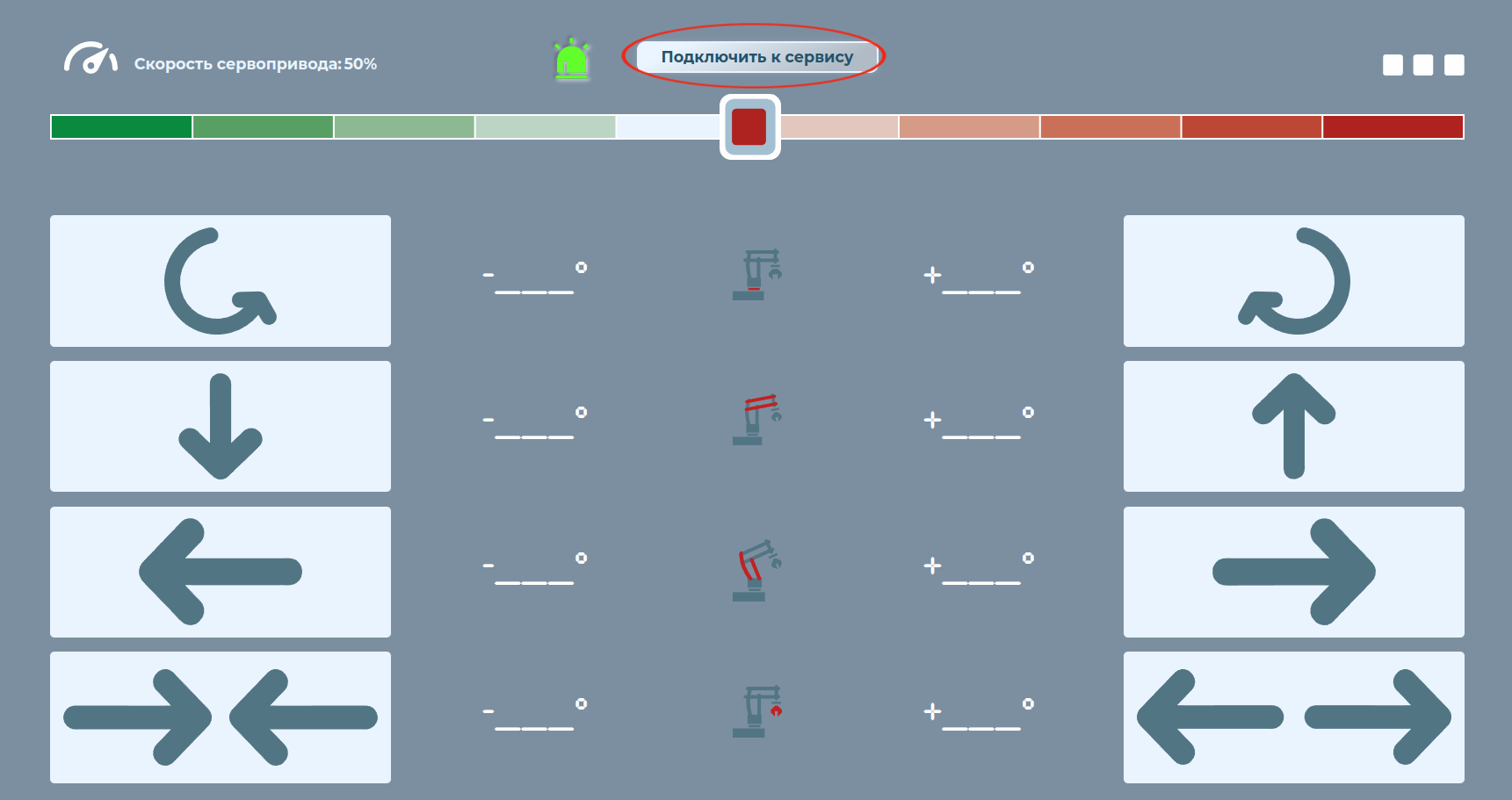
Ручное управление действиями робота выполняется с помощью панели управления.
Установка скорости вращения сервоприводов #
Скорость работы сервоприводов измеряется в процентах от максимальной и устанавливается перемещением ползунка влево и вправо. Перемещение ползунка влево уменьшает скорость вращения сервоприводов, вправо – увеличивает.
!!! ВНИМАНИЕ
!!! ВНИМАНИЕ
Значение скорости вращения устанавливается для всех сервоприводов.
Управление действиями робота с помощью манипулятора “мышь” #
Управление действиями робота осуществляется с помощью группы кнопок, выделенных для каждого сервопривода. Кнопки расположены в одну линию на экране.
На каждой кнопке изображена стрелка с направлением движения. При нажатии на кнопку правой клавишей манипулятора “мышь”, робот выполняет соответствующее данной кнопке действие.
По центру группы кнопок расположена пиктограмма работа, на которой красным цветом выделен сервопривод, которым управляет данная группа кнопок.
При работе сервопривода, изображение мерцает.
Рядом с каждой кнопкой имеется индикатор, показывающий угол отклонения сервопривода при ее нажатии.
-
вращение башни манипулятора вправо и влево вокруг вертикальной оси

-
движение рычага манипулятора вперед или назад

-
движение рычага манипулятора вверх или вниз

-
сжатие или разжатие рук клешни
Управление действиями робота с помощью мобильных устройств #

Управление действиями робота с помощью мобильных устройств
Для управления роботом с помощью экранов мобильных устройств (смартфоны, планшеты, где управление осуществляется без манипулятора “мышь”) рекомендуется использовать интерфейс “Геймпад”.
Кнопки распределены на правой и левой стороне экрана устройства для удобного управления пальцами. При нажатии на кнопку, робот выполняет соответствующее данной кнопке действие.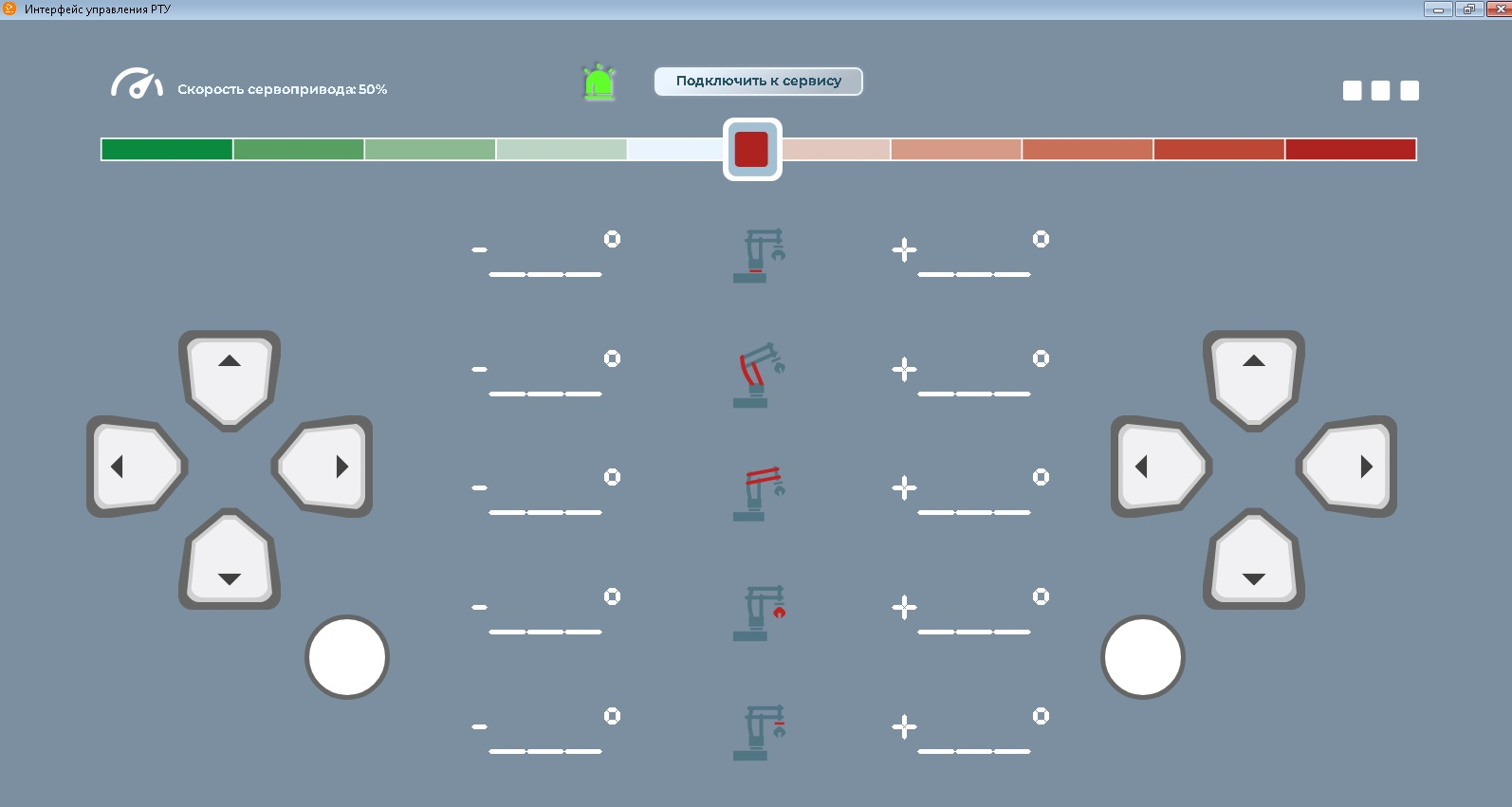
Левая группа кнопок:
- Кнопки «Влево», «Вправо» - вращение башни манипулятора вправо и влево вокруг вертикальной оси
- Кнопки «Вверх», «Вниз» - движение рычага манипулятора вперед или назад
Правая группа кнопок:
-
Кнопки «Влево», «Вправо» - сжатие или разжатие клешни
-
Кнопки «Вверх», «Вниз» - движение рычага манипулятора вверх или вниз
Управление действиями робота с помощью джойстика “Геймпад” #
Роботом можно управлять с помощью устройства “Геймпад”. Для этого необходимо подключить устройство “Геймпад” к компьютеру, к которому подключен робот. Управление роботов выполняется с помощью кнопок устройства “Геймпад” аналогично схеме “Геймпад” пульта управления.
Управление действиями робота с помощью смартфона #
Роботом можно управлять также со смартфона, открыв пульт управления через браузер. Для открытия пульта управления РТУ в адресной строке браузера необходимо указать IP адрес ПК, на котором установлена десктопная версия пульта РТУ и через двоеточие - порт, который был указан при установке пульта РТУ на ПК. При установке смартфона в горизонтальное положение автоматически будет применен интерфейс “Геймпад”. Управление роботом производится аналогично управлению на ПК.
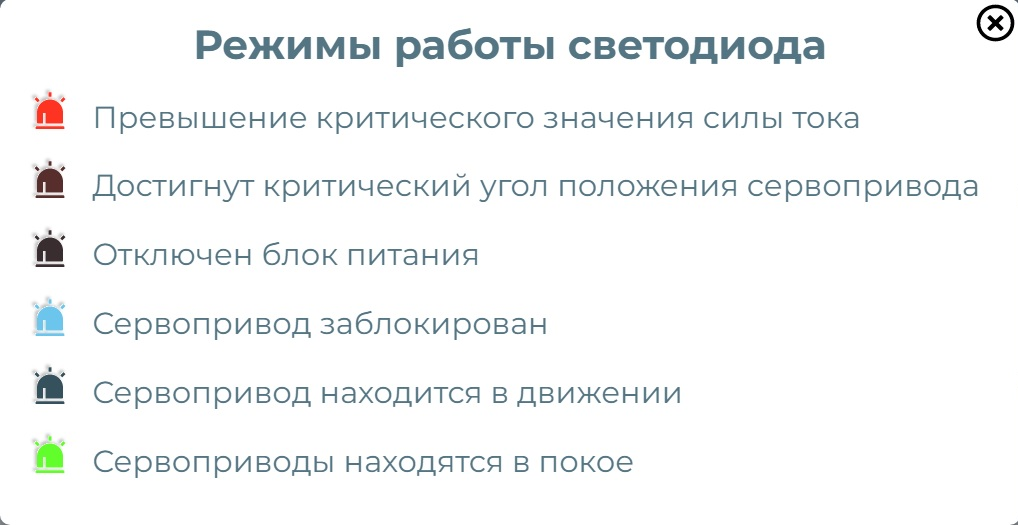
Отображение состояния робота с помощью светодиода #
При любом виде управления роботом, его состояние (движение, простой, достижение критических значений угла поворота) отображается с помощью светодиода установленного на роботе. Состояние светодиода отображается также на графическом изображении светодиода, расположенном посередине в верхней части экрана. В зависимости от состояния робота изменяется цвет и режим работы светодиода. Подсказка с описанием состояний светодиода открывается при нажатии на изображение светодиода левой кнопкой мыши.
 Программирование
ПрограммированиеПрограммирование
Запуск демонстрационных программ #
Для демонстрации возможностей робота доступны встроенные демонстрационные программы, выполняющие определенные задания. Для выбора программы необходимо нажать кнопку «Меню», выбрать пункт «Демо-программы» и выбрать интересующую программу из списка.
Остановить работающую демо-программу можно, выбрав в меню пункт «Остановка».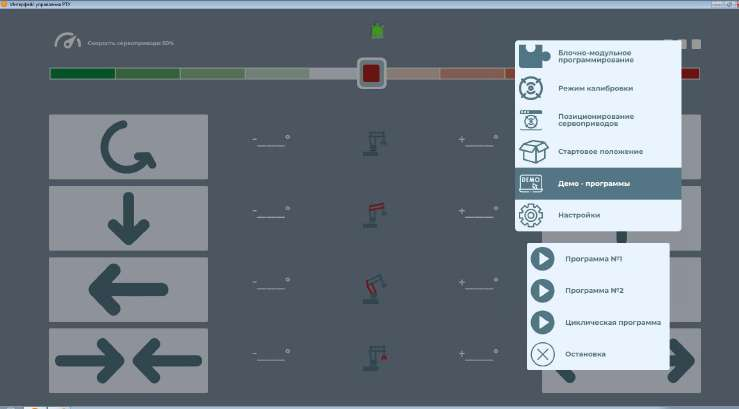
Блочно - модульное программирование #
Переход в режим блочно-модульного программирования #
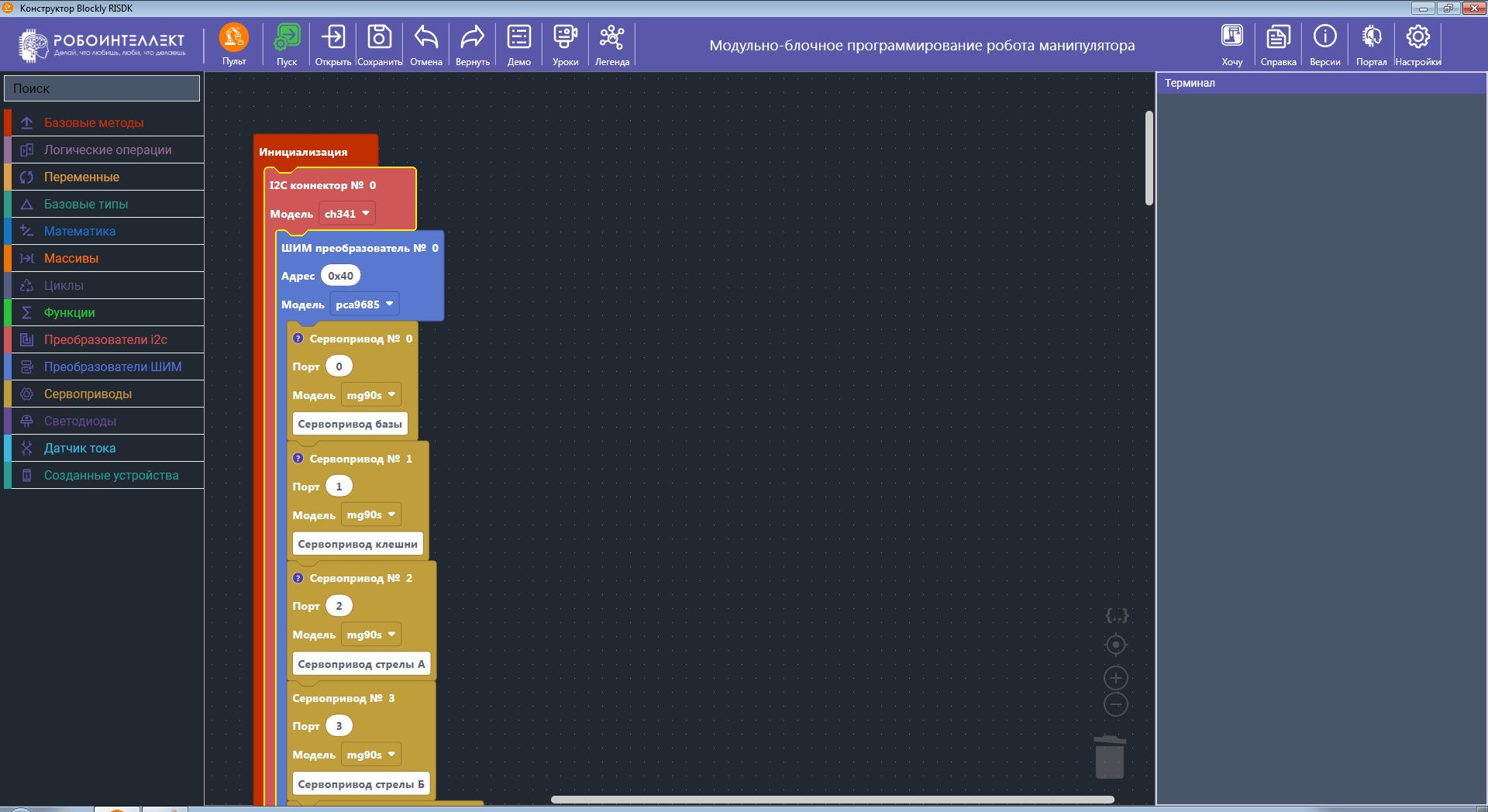
Для перехода в режим блочно-модульного программирования необходимо в меню выбрать пункт “Блочно-модульное программирование”

Откроется окно блочно-модульного программирования:
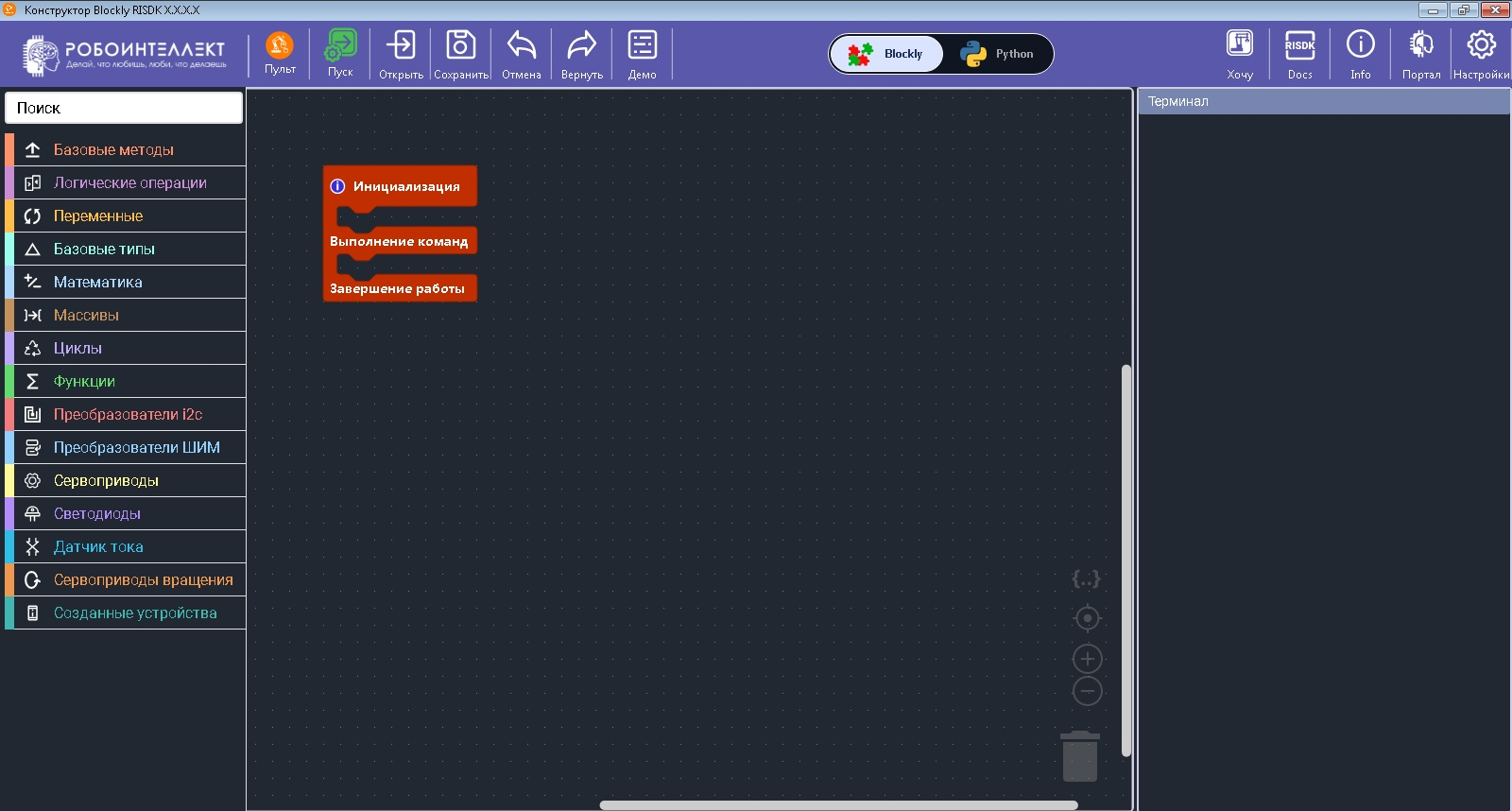
По умолчанию открывается тёмная тема оформления.
В левой части окна блочно-модульного программирования находится список блоков по категориям, посередине - рабочая область, справа - терминал, куда выводятся результаты выполнения программ.
Доступны следующие категории блоков:
- Базовые методы
- Логические операции
- Переменные
- Базовые типы
- Математика
- Массивы
- Циклы
- Функции
- Преобразователи i2c
- Преобразователи ШИМ
- Сервоприводы
- Светодиоды
- Датчик тока
- Созданные устройства
Иконка интерфейса Значение “Пульт” - производит переключение на “Пульт управления РТУ”; “Пуск” - запускает программу; “Открыть” - открывает ранее сохраненную программу из файла; “Сохранить” - сохраняет созданную программу в файл; ”Отмена” - отменяет последнее действие; “Вернуть” - возвращает отмененное действие; “Демо” - доступ к демонстрационным программам; “Blockly/Python” - Переключатель режимов среды разработки; “Хочу” - переход на сайт с описанием возможностей приобретения робота; “Docs” - справочная информация о работе с ПО; “Info” - описание изменений в выпущенных версиях ПО; “Портал” - переход на сайт https://robointellect.ru; “Настройки” - переход к настройкам интерфейса. Демонстрационные программы #
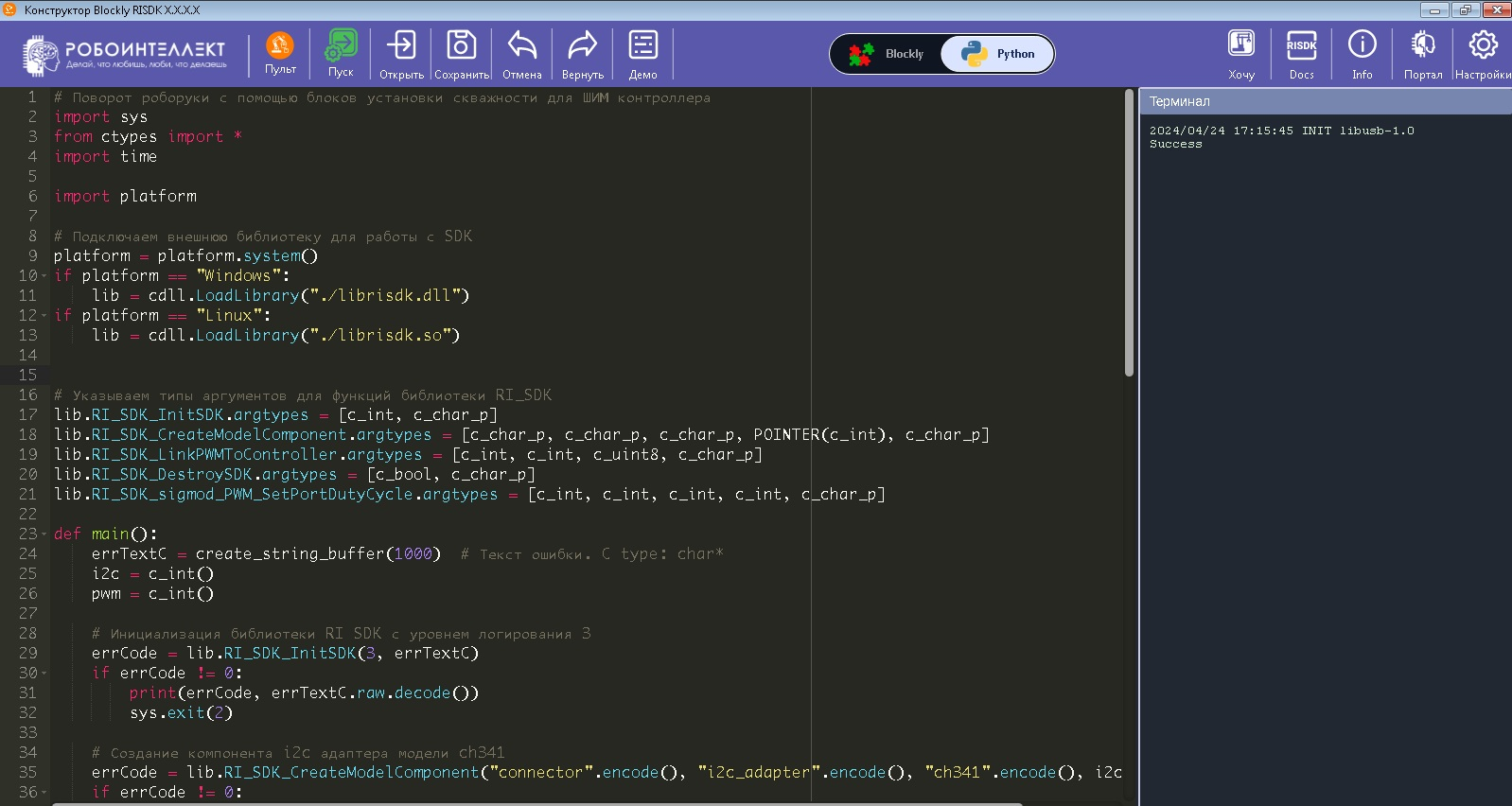
По умолчанию интерфейс блочно-модульного программирования открывается в режиме среды разработки “Blockly”. С помощью переключателя режимов среды разработки имеется возможность переключить его в режим “Python”.
При нажатии кнопки “Демо” откроется список демонстрационных программ. В настоящее время в режиме“Blockly” доступны следующие программы:
- Поворот по шагу;
- Поворот по скважности;
- Поворот с помощью записи байтов в регистр PWM;
- Поворот с помощью записи байт;
- Перемещение кубика (С 7 на 3 позицию);
- Считывание показания с датчика тока;
- Мерцание светодиода;
- Работа с переменными;
- Работа с циклами;
- Работа с логическими операторами;
- Работа с функциями;
- Работа с массивами.
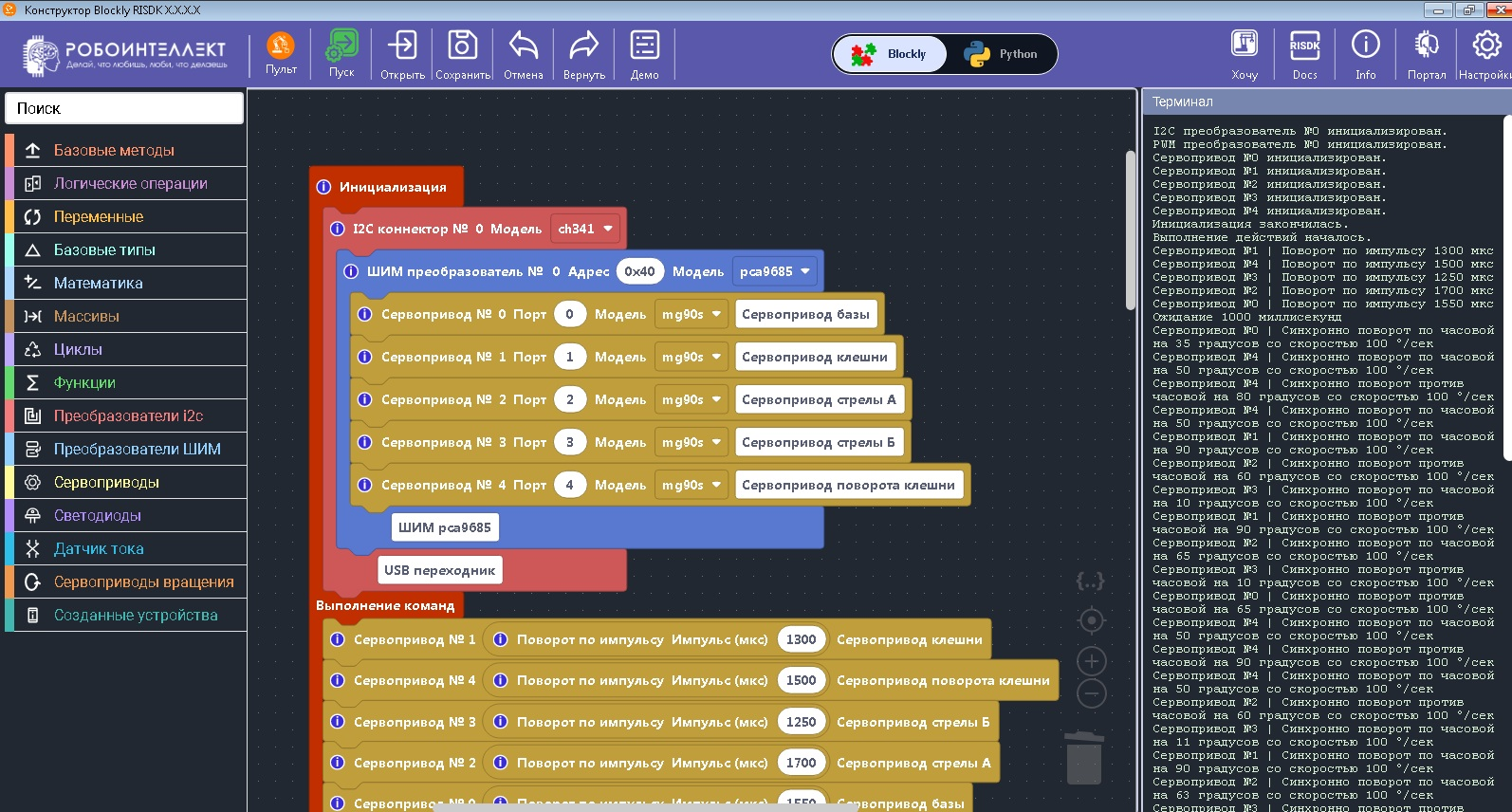
Для загрузки программы достаточно щелкнуть мышкой по выбранной программе и она загрузится в рабочую область:
Для запуска программы необходимо нажать кнопку “Пуск”. После выполнения программы в терминал будет выведен результат работы программы:
Если попытаться загрузить программу при уже открытой программе в рабочей области, будет выведено сообщение о том, что программа загружена и при загрузке новой программы данные загруженной программы будут утеряны

В режиме “Python” доступны следующие демо-программы:
- Поворот по скважности;
- Работа с сервоприводом вращения;
- Считывание показаний с датчика тока.
Запуск демо-программ осуществляется так же как и в режиме “Blockly”
Если попытаться загрузить программу при уже открытой программе в текстовом редактор, будет выведено сообщение о том, что программа загружена и при загрузке новой программы написанный код в текстовом редакторе пропадет.

Уроки #
Для доступа к урокам необходимо нажать кнопку “Уроки” и из появившегося списка выбрать интересующий урок. Урок представляет собой видеоролик, размещенный на Youtube.
Доступны следующие уроки:
- Урок 1. Базовые методы;
- Урок 2. Преобразователи i2c;
- Урок 3. ШИМ - преобразователи;
- Урок 4. Сервоприводы;
- Урок 5. Светодиоды;
- Урок 6. Датчики тока;
- Урок 7. Циклы;
- Урок 8. Переменные;
- Урок 9. Логические операции;
- Урок 10. Функции.
Удаленное подключение и управление роботом с помощью онлайн сервиса “РобоИнтеллект” #
Удаленный доступ позволяет программировать робота из любой точки при наличии доступа в сеть Интернет. Подключите Вашего робота к сервису удаленного доступа и используйте онлайн сервис “РобоИнтеллект” для работы со своим устройством из любого места, где есть Интернет, или предоставьте доступ другим пользователям.
Подключиться можно с телефона или планшета на базе Android или iOS, а также с компьютера. В любом случае вы без труда получите удаленный доступ к своему устройству, сможете подключиться роботу даже в дороге. Он-лайн сервис “РобоИнтеллект” https://robointellect.ru/service предоставляет удобную платформу, позволяющую создавать, отлаживать, выполнять программы управления роботами.
Подключение к сервису удаленного управления “РобоИнтеллект” #
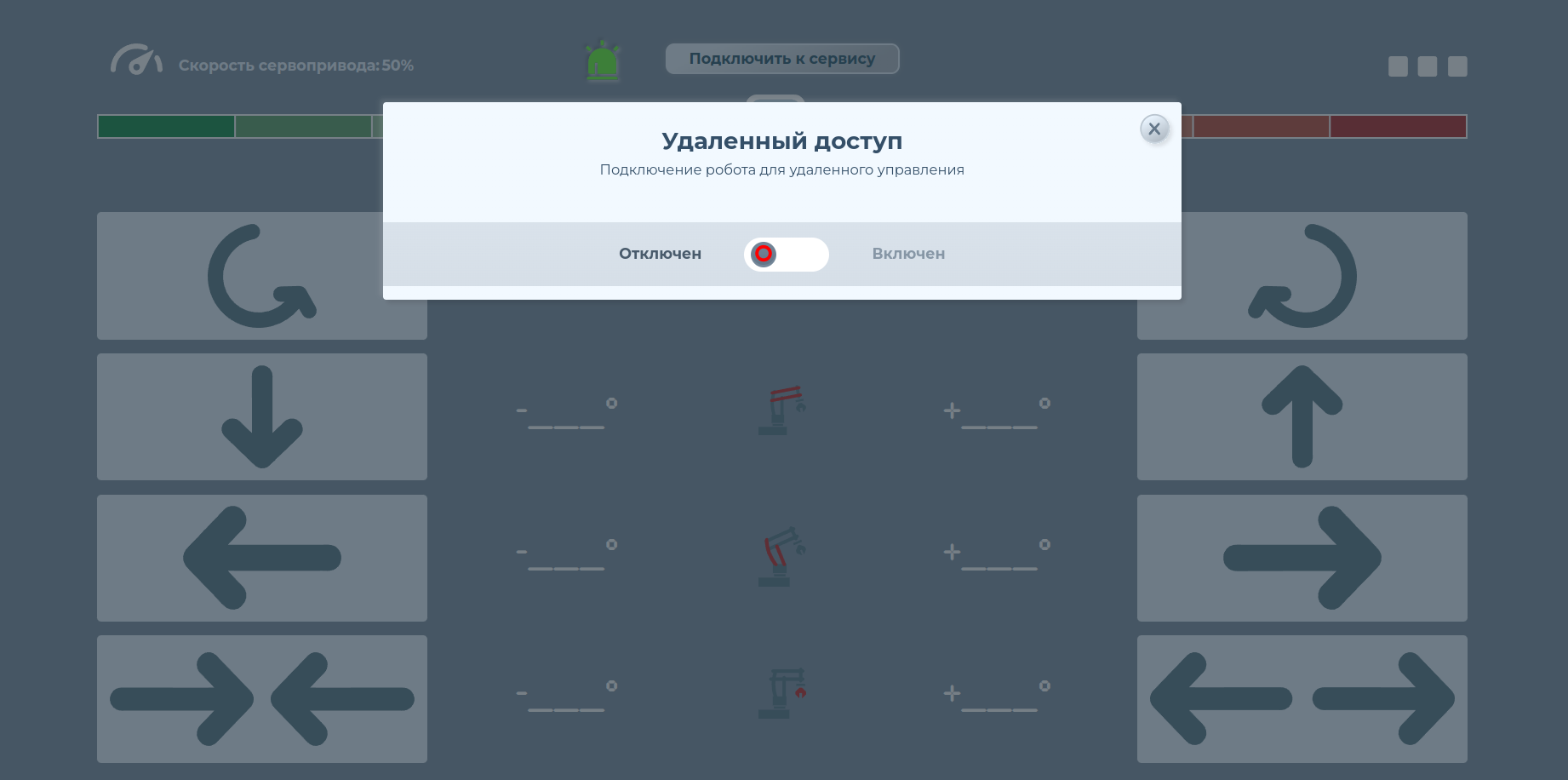
После запуска пульта управления РТУ нажмите на кнопку “Подключить к сервису”, расположенную по центру экрана.
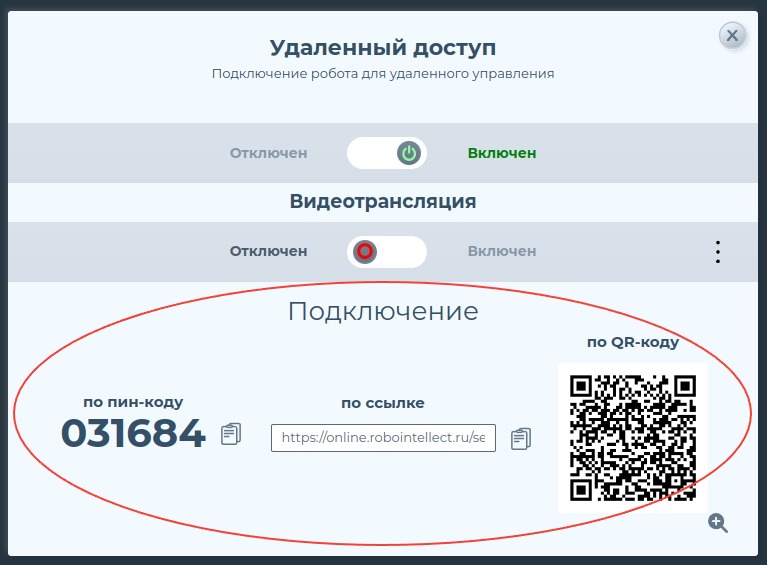
В открывшемся окне удаленного доступа нажмите на переключатель чтобы сдвинуть его в положение “Включено” и подключить робота для удаленного управления. При этом ручное управление роботом будет заблокировано.
Доступ к устройству можно получить, если ввести уникальный сгенерированный пин-код своего пульта управления, перейти по ссылке в браузере, или воспользоваться qr-кодом для подключения.
!!! ВНИМАНИЕ
После включения удалённого доступа ручное управления Вашим роботом с пульта управления и другого локального устройства будет заблокировано.
Сервис удаленного управления обеспечивает общение между пультом управления РТУ и онлайн средой блочно-модульного программирования blockly. Созданные в ней программы можно выполнять на роботе, подключенном к пульту. Программа может быть составлена из различных блоков языка Blockly, написана на языке программирования Python, с использованием подключаемой библиотеки RI SDK.
Документацию по используемой IDE, RI SDK Вы можете изучить по ссылке http://robointellect.ru/docs.
Отключение от сервиса удаленного управления “РобоИнтеллект” и восстановление ручного управления #
Для отключения Вашего робота от сервиса “РобоИнтеллект” необходимо переключатель в окне “Удалённый доступ” установить в положение “Отключен”, для этого щёлкните по нему правой кнопкой манипулятора “мышь”. Ползунок передвинется в положение “Отключен” и, окно удаленного доступа можно будет закрыть. Ручное управление действиями робота будет разблокировано.
!!! ВНИМАНИЕ
При повторном подключении робота к сервису удаленного управления генерируется новый пин-код, поэтому старая ссылка не будет работать.
Удалённое подключение к роботу #
После того, как Вы разрешите удалённое управление своим роботом, получите Pin код и ссылку для подключения, можно подключиться к Вашему роботу с любого компьютера, смартфона, планшета, находящегося в сети Интернет.
Для этого перейдите в браузере по сформированной ссылке. Подключение произойдет автоматически.
Далее можно разрабатывать, отлаживать, запускать программы, которые будут управлять Вашим роботом.
!!! ВНИМАНИЕ
Он лайн сервис “РобоИнтеллект” имеет возможность подключиться к любому роботу даже не имея прямой ссылки. Необходимо только знать Pin код подключения.
Чтобы подключиться к нужному роботу с помощью пин-кода, нажмите на кнопку “Подключить своего робота”, расположенную в правой части экрана, над терминалом и видеотрансляцией.

В появившемся окне введите пин-код, созданный при подключения пульта управления к сервису удаленного доступа и нажмите “Подключить”.